自主模式
地块规划与作业教程:https://www.bilibili.com/video/BV1US4y1m77f?spm_id_from=333.999.0.0
千 寻 连 接 教 程:https://www.bilibili.com/video/BV1dU4y1g7YN?spm_id_from=333.999.0.0
地块测绘
自动作业前,需要测绘出作业的地块边界,以及中间障碍信息。点击测绘进入测绘页面:
图 测绘地块类型选择

选择要测绘的地类型:
多边形地块:针对整片的大田地块,测绘地块的边界,然后规划航线在地块内作业。
自由航线:针对不规则喷洒的需求,例如喷洒不规则果树,需要在树上方停留喷洒等。
农服APP支持手机/遥控器/飞机/RTK基站/打点器/地图共6种地块测绘方式,其中飞机/RTK基站/打点器可支持RTK高精度打点(选配了RTK版本)。
下面以打点器为例讲述如何进行高精度RTK地块测绘。
1) 首先进入遥控器设置页面,然后连接千寻服务;
图 开启千寻服务

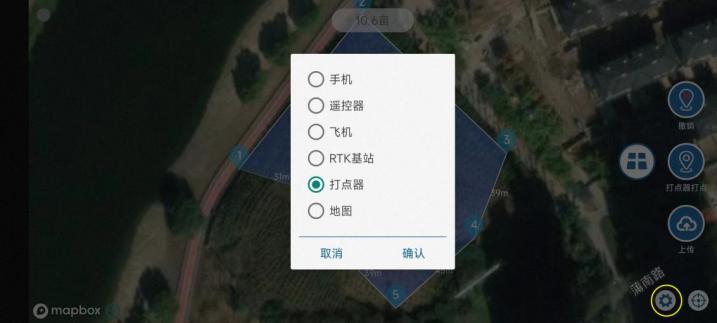
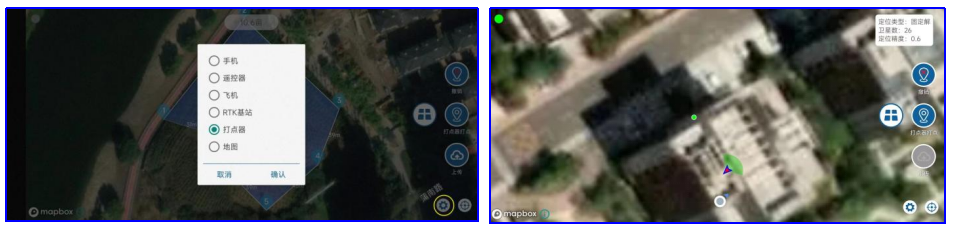
2)进入测绘界面,选择多边形地块/自由航线,然后点击图中右下角打点器选择按钮,选择打点器,选择相应的打点设备,点击确定,APP会自动连接设置过的打点器蓝牙,连接成功后打点器的定位状态和位置会显示在地图上。
图 打点模式选择
3)点选择黄框内①打点类型-边界点。②记录该点。在需要打点的边界点击②打点,直到所有边界点记录完成,中途打点位置错误时可点击撤销按钮,撤销上一个点重新打点。
图 多边形地块打点

4)测绘完成多边形的边界后,如果需要,可以在多边形内部进行障碍物打点,单击打点类型按钮,进入到障碍点测绘模式。同样点击打点按钮,记录障碍物边界,障碍物边界记录完成后需要点击结束障碍按钮,完成障碍物的区域的测绘。
图 障碍物打点切换示意图

- 如需测绘电线杆/树木等圆形障碍物,可继续通过点击下方打点类型按钮切换到电线杆障碍物测绘模式,然后将打点器放置在障碍物中心,点击打点按钮,即可自动的生成一个多边形的障碍区域,右下角尺子图标可自由设置电线杆障碍区域的半径大小。
图 杆体障碍物测绘示意图

- 完成所有测绘后,将打点类型切换到边界点,点击上传按钮,可将本次测绘的地块信息、障碍物信息保存并同步到植保网络管理平台,供后续作业使用,如下图所示。
图 地块上传服务器
至此,测绘工作完成。
航线规划
地块测绘完成后,需要对地块进行编辑,生成航线,航线编辑主要可如下属性:
1)航线生成
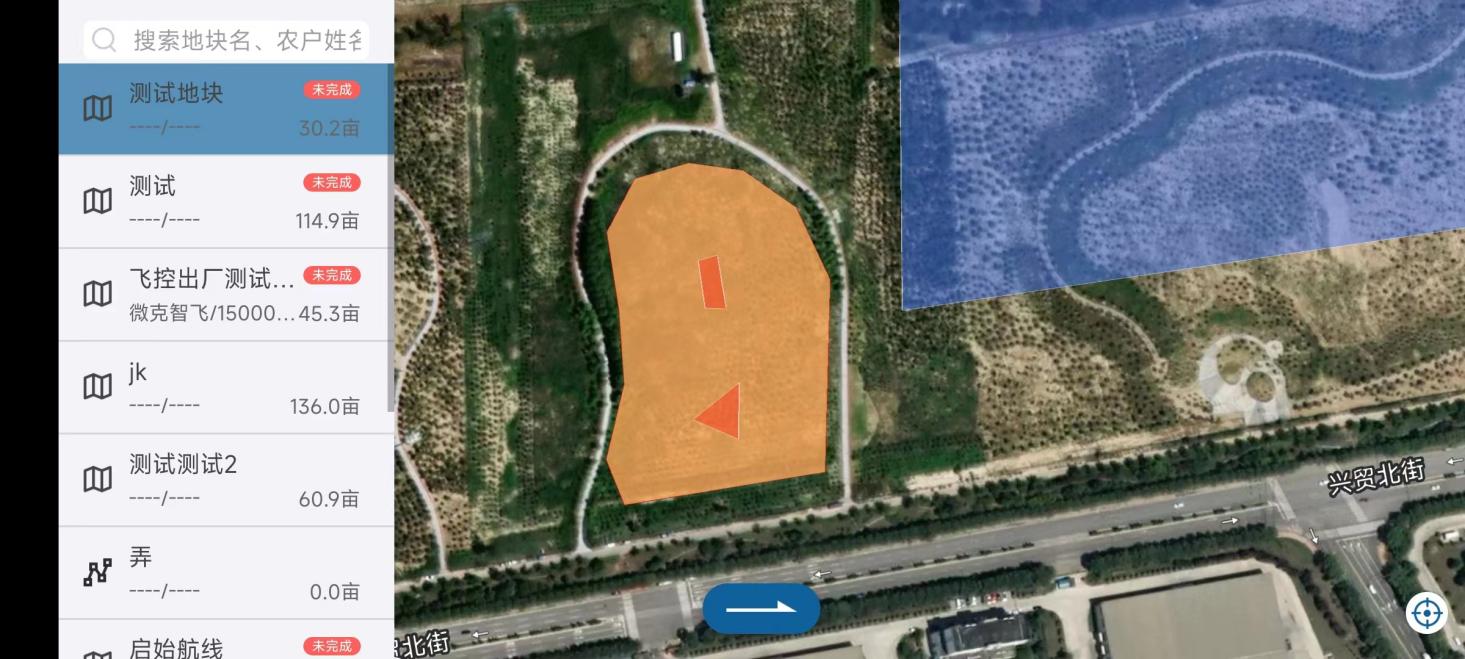
- 进入自动作业界面,会显示定位位置附近的,当前账号所拥有的地块。APP通过网络从植保管理平台获取地块,若网络不流畅未获取成功,可在地块列表下来再次刷新列表。完全没有网络的地方,地块将被保存在本地。
- 在地块列表中,选择要作业的地块。可点击下一步按钮进入地块规划。
图 地块选择
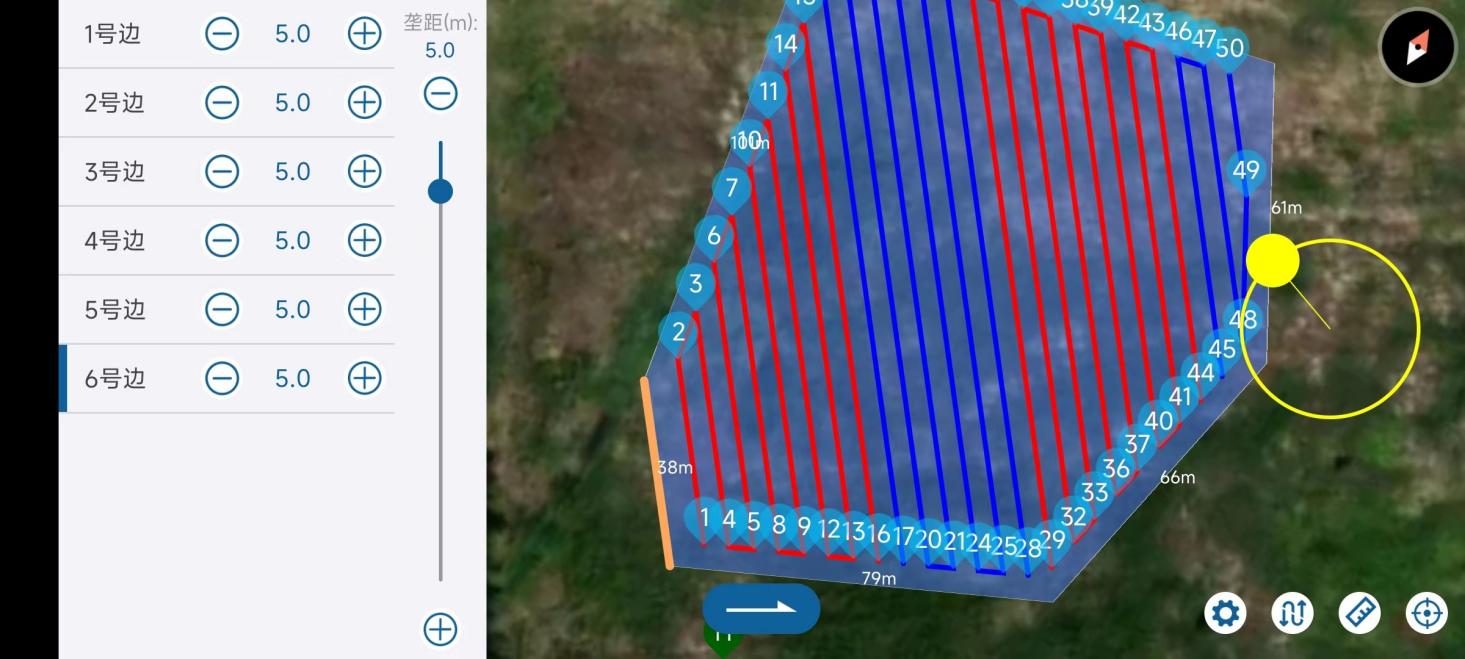
- 进入地块规划界面后,可以设置地块规划相关的航线方向,缩边距离,垄距宽度,起始点位置等。
图 地块规划参数设置

- 选择不同的边(1号边/2号边……),所规划的航线将与被选择的边(橙标亮)平行。
- 每条边都可以设置一个安全距离,安全距离可以通过加减按钮,或直接输入数字来设置。
- 可选择地块任意一个顶点作为航线的起始点,轻触地块顶点附近,①号航点就是自动规划到该顶点附近。
- 地块边界的航线方向不满足作业时,可使用任意角度圆盘,调整航线角度。
- 点击航线类型按钮,可以选择当前地块要规划的航线类型,可规划弓形航线/绕边航线/果树航线/抛投航线。
弓形航线:在地块上规划来回的弓字形航线。
绕边航线:绕地块边缘一圈的航线,用于扫边
果树航线:对于整排的果树作业,可在一侧树排端点处打点1/2/3/4,另一侧树排端点处打点5/6/7/8,规划果树航线时会自动连接1-8,2-7,3-6,4-5连接成线并规划飞行路径。
抛投航线:对于抛投机型,每隔一段距离可规划一个抛投点。
- 点击智能里程按钮,可设置单次飞行的最大飞行里程,设置完成后,规划航线时会把航线分段,在设置的最大飞行里程内的距离起始点近的航点处结束本架次航线。无人机将执行悬停/返航动作,下架次起飞后也会从近处开始下一段航线。此功能设置合理可保证每次都在距离起始点近的位置结束航线,下一架次不用载重飞行到远处。如将智能里程设置为0,则关闭智能规划功能,如下图:
图 智能里程开启示意图
- 点击安全距离按钮,可统一设置安全边界距离,以及障碍物边界安全距离。边界安全距离表示航线内缩距离,障碍物边界安全距离表示障碍物附近航线外扩距离。
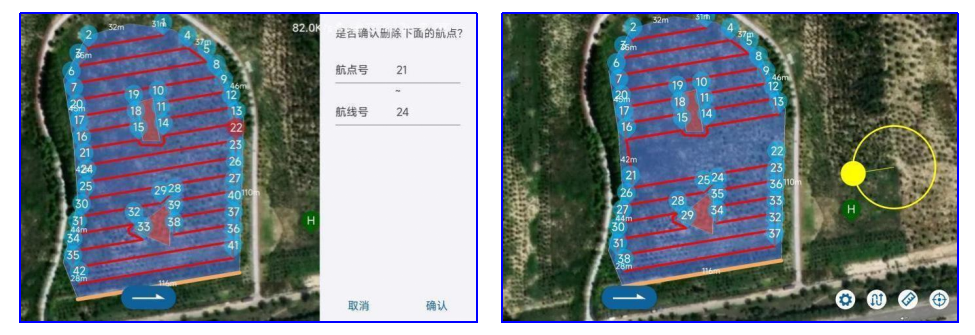
2)删除部分航点
在实际的作业过程中,一个地块中间可能有几条航线是不用作业的,可通过删除航点的办法将不用作业的航线删掉,具体操作是:点击删除航线的航点序号图标,在弹出的提示框中输入删除航线的结束点序号,然后确认,如下图:
图 删除航点示意图
3)设置辅助起飞点降落点
如果在起飞点和航点1之间,或者起飞点与返航点之间存在障碍,可在地图上设置起飞/返航,操作:地图上长按,1秒钟后地图上会显示红色的三角,说明辅助点设置成功。辅助点需要提前设置,执行飞向一点之前以及执行返航之前。重新上传航线或者点击清除辅助点按钮可清除辅助点。
图 设置辅助点

自主飞行
航线规划完成后,点击下一步 按钮,结束规划,进入航线作业界面,如下图。
按钮,结束规划,进入航线作业界面,如下图。
图 自动作业界面

检查航线正常后,点击参数设置来设置航线的高度/速度/亩用量,然后上传航线(切记开始作业前一定要上传航线),然后起飞等待无人机自动起飞,起飞后点击作业无人机开始按照预定航线作业。
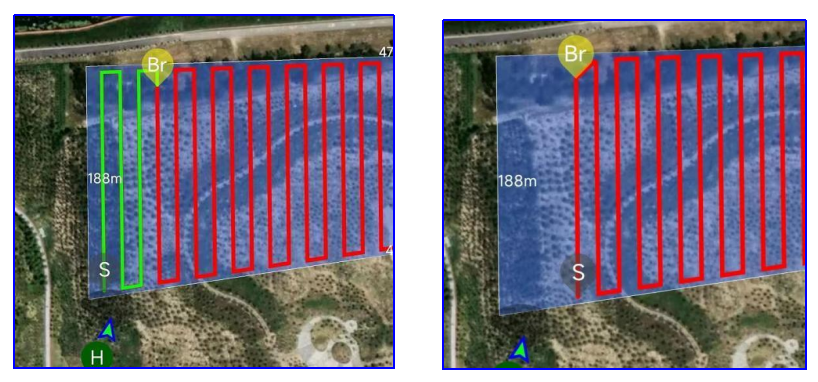
航线重排:对于断点在较远处的作业,可以使用航线重排功能,点击航线重排后会在距离无人机较近的位置重新规划起始航点,然后开始作业。航线重排后切记要再次上传航线。
图 航线重排示意图
移动航线:对航线进行整体移动,对于地块整体有偏差的,可使用航线移动来调整航线偏差。
急停:航线过程中可点击急停来暂停航线。
开关灯:对于配备了照明灯的无人机,此按钮可开关夜间照明灯。
拍照:对于配备了摄像头的无人机,此按钮可控制摄像头进行拍照取景。
开关快捷键:可快捷开关防地/避障雷达,及高度控制方式。
- 航线未完成,无人机返航换电加药后,继续作业时,无需上传航线,无人机起飞后,再次点击作业,则飞机会飞往上次航线的断点;
- 装有避障雷达,在离起飞点3米范围内不启用。
- 换垄模式可选择直角转弯或者U型弯;
- 航线过程中支持油门/航向实时调整,并且支持遥控器操作避障,具体操作参见3.1.4章节;
- 喷洒量可设置为固定水泵输出或亩用量自动随速模式。
- 地块未作业完成需要隔天继续作业时,下次只需选择当前地块,进行规划时APP会提示选择继续上次作业/读取上次规划/重新规划,选择继续上次作业,即可从后台调取上次作业情况,继续上次未完成的任务。
图 继续上次作业示意图

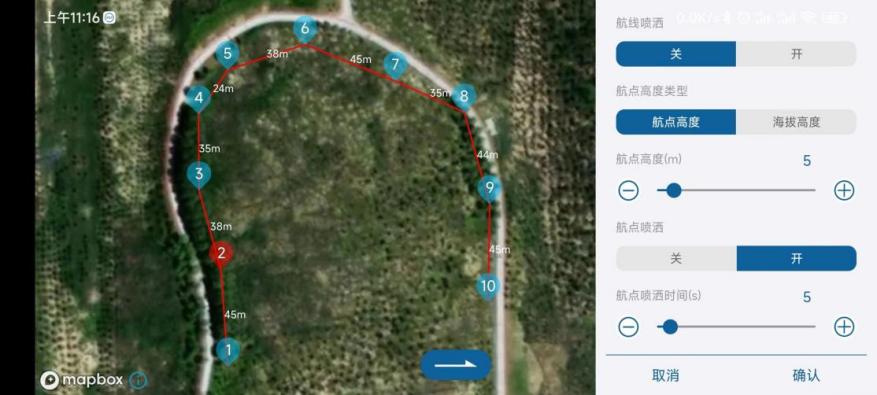
自主飞行--果树模式
果树模式是通过测绘飞机(或使用飞机打点)将每棵树的经度、纬度、高度(分相对高度和海拔高度)测量出来,规划成航线。其中可设定航线是否喷洒,航点悬停喷洒时间。也可提前测绘地块生成可使用的航线后保存成.cvs或.kml文件导入APP使用。
- 进入测绘界面,选择自由航线开始打点或者选择右上角导入按钮,导入已生成好的航点文件。
图 自由航线测试选择

- 对要进行飞行的路径进行打点。自由航线无人机会按照测绘的路径进行飞行。
- 进入自动作业界面,选择测绘完成的自由航线,设置自由航线的喷洒开关,悬停时间等参数,设置完成后,上传航线,执行作业。
图 自由航线测绘示意图
果树模式视频教程:https://www.bilibili.com/video/BV1M44y1V7A2?spm_id_from=333.999.0.0