开始作业
作业模式为手动作业。
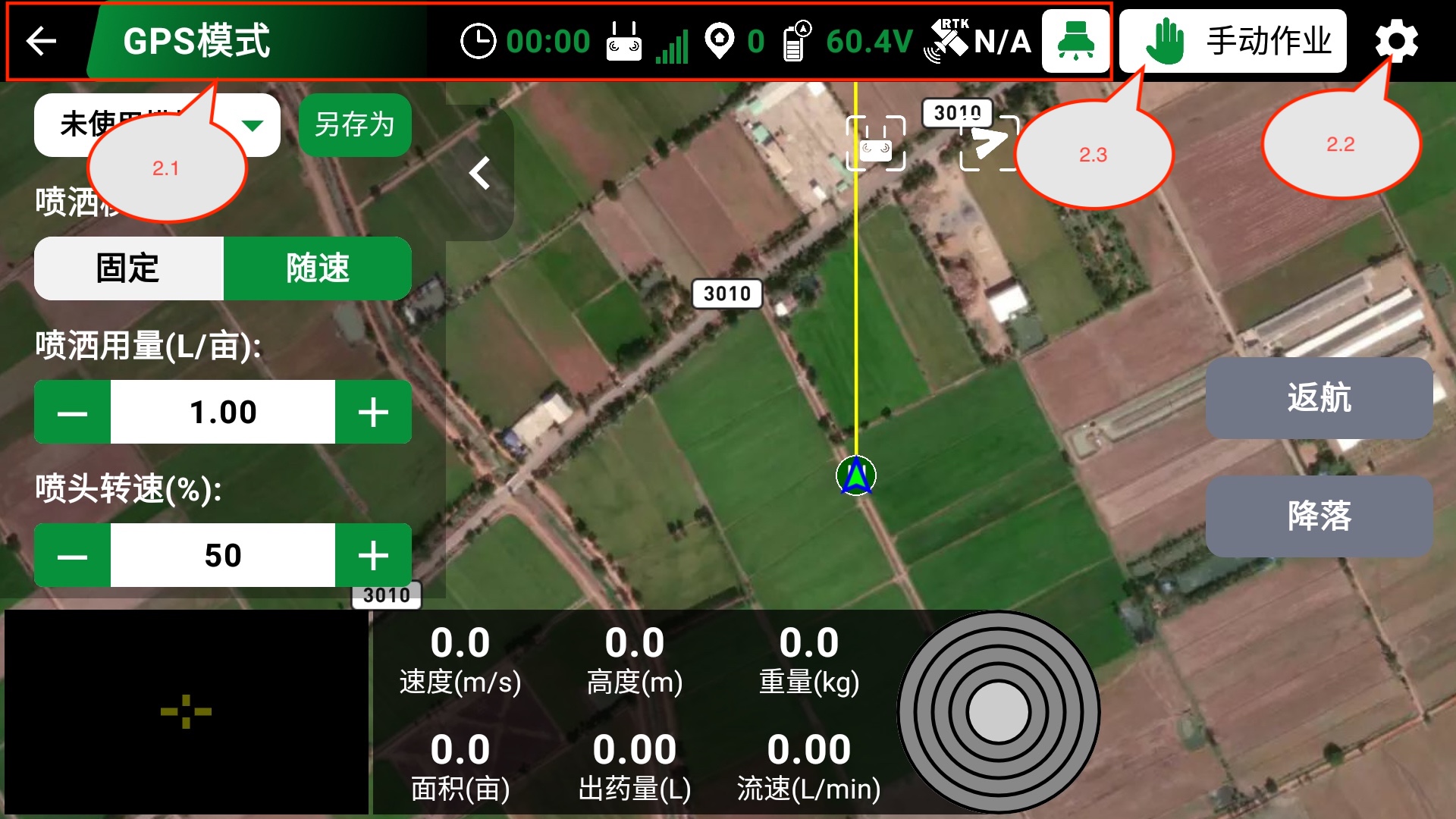
状态栏
- 当前模式
- 当前作业进行时间
- 遥控器信号强度
- 离家距离
- 电池电量(可点击查看详细数据)
- GPS信息(可点击查看详细数据)
- 当前作业模式(喷洒|播撒)
设置
飞行设置

手动控制高度
- 关闭:无人机将按照预设的高度飞行。
- 可控:用户可以手动调整无人机的高度。
- 自动:无人机将根据地形自动调整高度。
机头方向
-
机头锁定:无人机的机头方向固定,不会随操作员的控制而改变。
-
机头跟随:无人机的机头方向将跟随操作员的控制方向。
转弯方式 - 直角转弯:无人机在转弯时将执行直角转弯。
-
U形转弯:无人机在转弯时将执行U形转弯。
-
常规转弯:无人机在转弯时将执行常规转弯。
机臂锁定传感器
- M1:启用第一个机臂锁定传感器。
- M2:启用第二个机臂锁定传感器。
- M3:启用第三个机臂锁定传感器。
- M4:启用第四个机臂锁定传感器。
- 开关:启用或禁用机臂锁定传感器。
起航/返航高度(m) - 设置范围:用户可以设置无人机起航和返航的高度,范围为0到最大值
起航/返航速度(m/s)
- 设置范围:用户可以设置无人机起航和返航的速度,范围为0到最大值。
最远飞行距离(m) - 设置范围:用户可以设置无人机最远的飞行距离,范围为0到最大值。
喷洒设置

喷洒系统
- 开关:控制喷洒系统的开启和关闭。关闭后,无人机无法进行喷洒作业,但可以正常执行航线。
喷洒模式 - 固定:喷洒量固定,不受飞行速度影响。
- 随速:喷洒量根据飞行速度自动调整。
喷洒用量(L/亩)
- 设置范围:用户可以设置每亩地的喷洒用量,范围为0到最大值。
喷头转速(%)
- 设置范围:用户可以设置喷头的转速百分比,范围为0到最大值。
喷头模式
-
双喷头:启用两个喷头进行喷洒作业。
-
四喷头:启用四个喷头进行喷洒作业。
喷洒系统实时数据
-
总流量(L/分钟):显示当前喷洒的总流量。
-
已喷药量(L):显示已喷洒的药量总量。
-
药箱载重(kg):显示药箱当前的载重。
-
液位计状态:显示药箱内液体的液位状态。
水泵实时数据
-
编号:显示水泵的编号。
-
转速(转/分钟):显示水泵的转速。
-
流量(L/分钟):显示水泵的流量。
离心喷头实时数据
-
编号:显示离心喷头的编号。
-
转速(转/分钟):显示离心喷头的转速。
播撒设置
雷达设置

避障雷达
- 开关:控制避障雷达的开启和关闭。开启后,无人机将使用避障雷达检测障碍物并自动避障。
雷达避障距离
- 设置范围:用户可以设置雷达检测障碍物的最大距离,范围为0到最大值。
探测到障碍物
-
悬停:当雷达检测到障碍物时,无人机将悬停。
-
绕行:当雷达检测到障碍物时,无人机将绕行。
前避障雷达灵敏度
- 设置范围:用户可以设置前避障雷达的灵敏度,范围为0到最大值。
后避障雷达灵敏度
- 设置范围:用户可以设置后避障雷达的灵敏度,范围为0到最大值。
仿地雷达
- 开关:控制仿地雷达的开启和关闭。开启后,无人机将使用仿地雷达检测地面高度并自动调整飞行高度。
地形跟随系数
- 设置范围:用户可以设置地形跟随系数,范围为0到最大值。
RTK设置

信号源
-
千寻网络:使用千寻网络提供的RTK服务。
-
NTRIP:使用NTRIP(Network Transport of RTCM via Internet Protocol)服务。
-
USB:通过USB连接外部RTK接收器。
网络状态
-
开关:控制RTK网络连接的开启和关闭。
-
断开:当前网络状态为断开,需要手动连接
电池管理
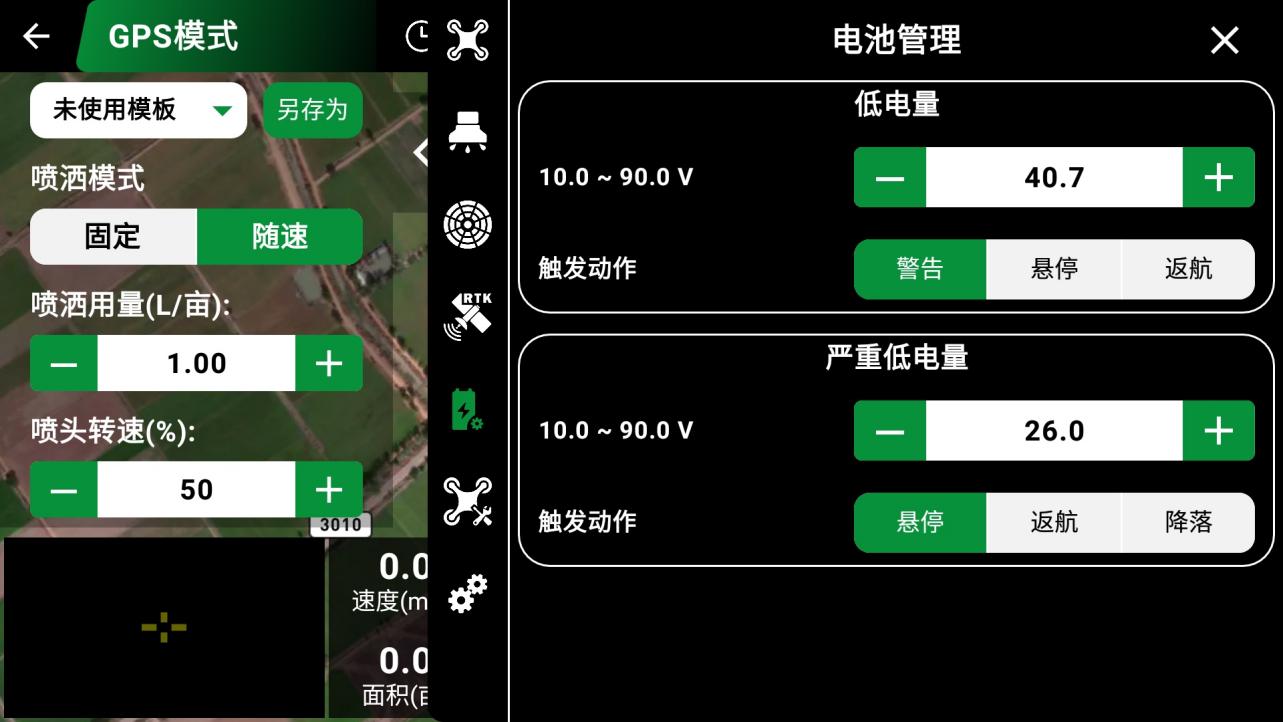
低电量设置
-
电压范围:设置低电量的电压范围(10.0 ~ 90.0 V)。
-
触发动作:设置低电量时的触发动作。
-
警告:显示警告信息。
-
悬停:无人机悬停。
-
返航:无人机返航。
严重低电量设置
- 电压范围:设置严重低电量的电压范围(10.0 ~ 90.0 V)。
- 触发动作:设置严重低电量时的触发动作。
- 悬停:无人机悬停。
- 返航:无人机自动返航。
- 降落:无人机自动降落。
作业机设置
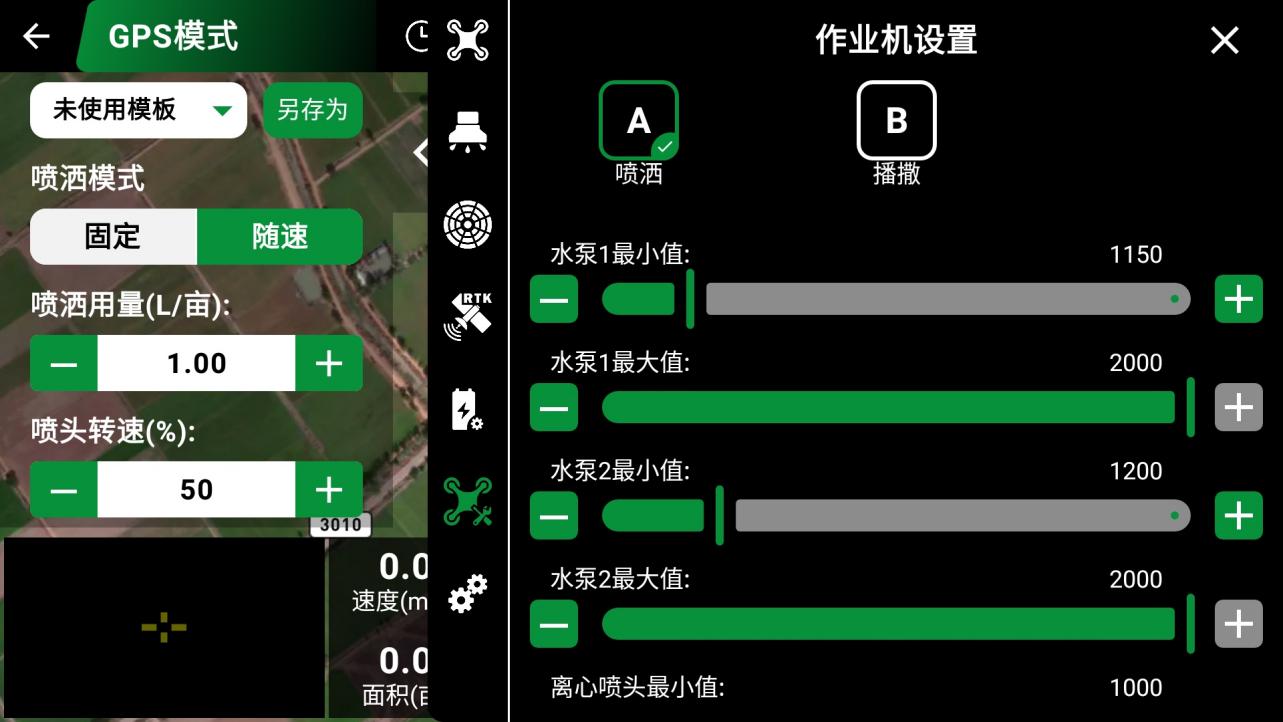
作业模式
- 喷洒:选择喷洒作业模式。
- 播撒:选择播撒作业模式。
水泵设置
- 水泵1最小值:设置水泵1的最小工作值。
- 水泵1最大值:设置水泵1的最大工作值。
- 水泵2最小值:设置水泵2的最小工作值。
- 水泵2最大值:设置水泵2的最大工作值
离心喷头设置
- 离心喷头最小值:设置离心喷头的最小工作值。
- 离心喷头最大值:设置离心喷头的最大工作值。
其他设置
作业方式
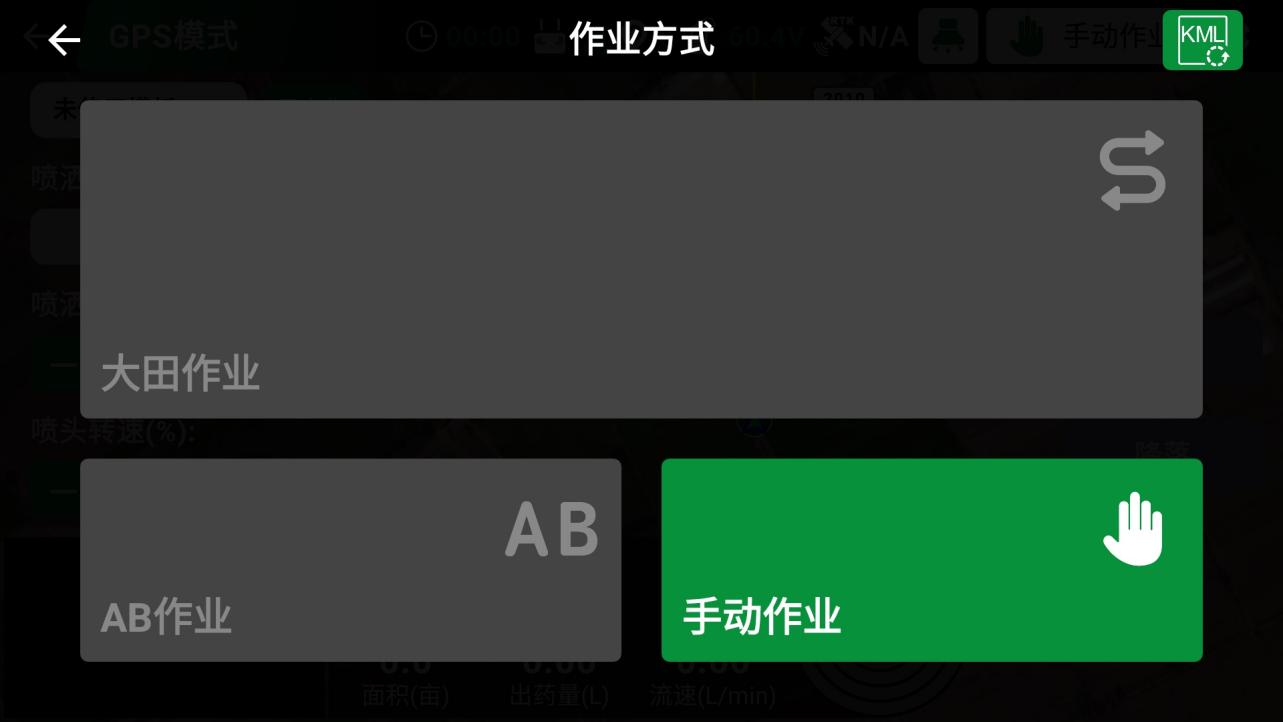
点击状态栏右侧可以进行作业方式切换,默认为手动模式。 作业模式分为三个部分
- 1.大田作业
- 2.AB点作业
- 3.手动作业(默认模式为手动模式)
手动作业

完全手动的作业模式。
作业模式 - 喷洒模式:固定 | 随速 - 固定模式:设置水泵大小 - 随速模式:设置喷洒用量 - 喷头转速:设置喷头转速(%)
操作
- 返航:点击返航按钮,无人机自动返航。
- 降落:点击降落按钮,无人机自动降落。
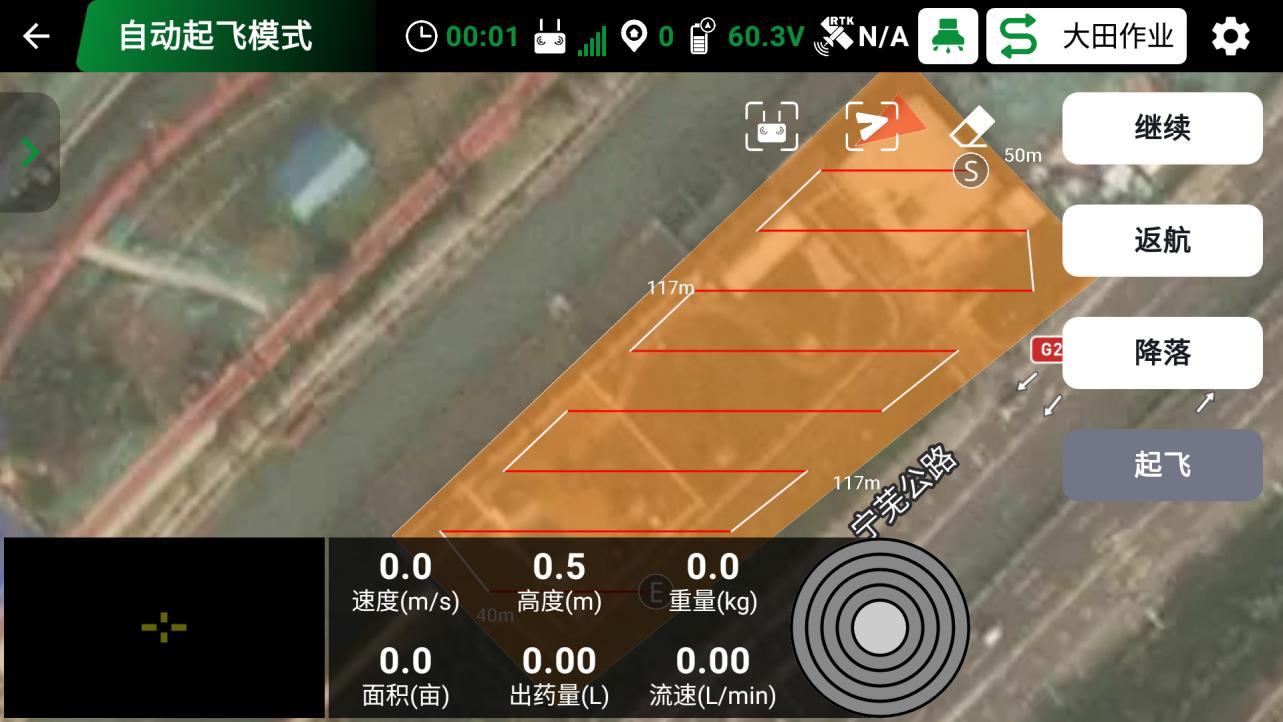
实时信息
- 速度:显示当前飞行速度(m/s)
- 高度:显示当前飞行高度(m)
- 重量:显示当前负载重量(kg)
- 面积:显示已喷洒面积(亩)
- 出药量:显示已喷洒药量(L)
- 流速:显示当前喷洒流速(L/min)
- 雷达信息:显示雷达检测信息
大田作业
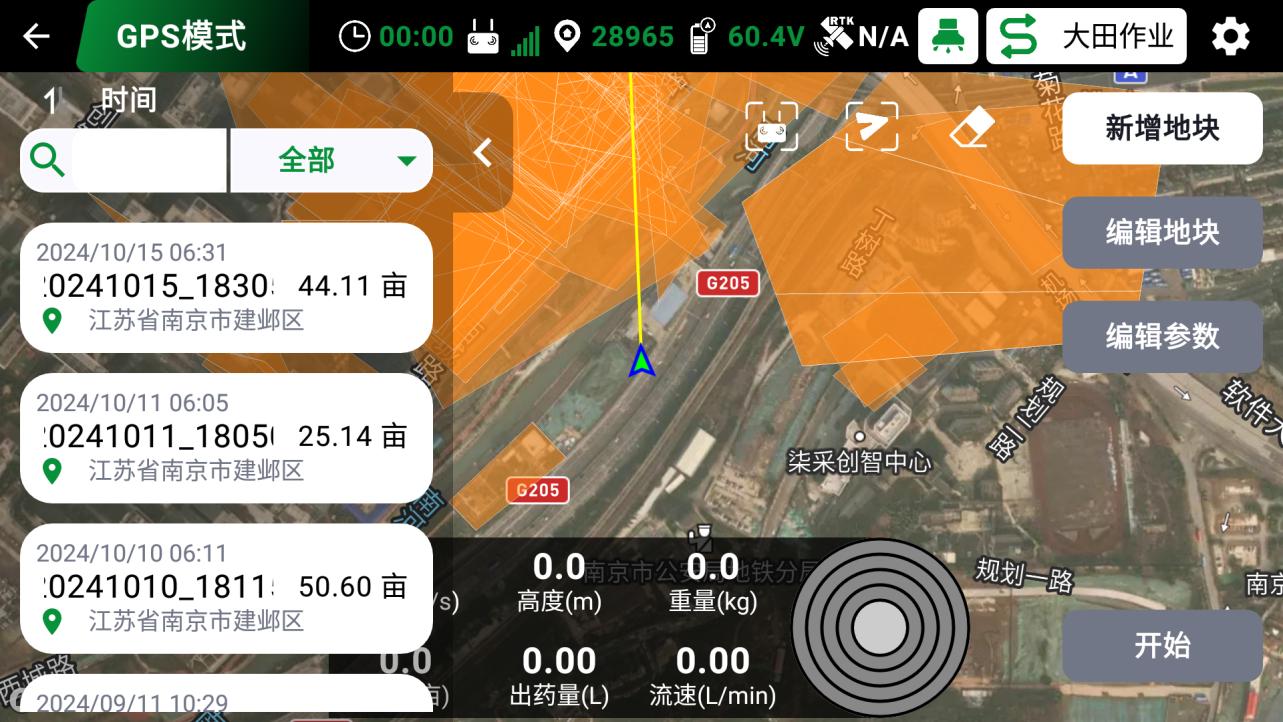
作业流程
- 新建地块:创建新的作业地块。
- 选中地块,编辑参数:选择地块并设置作业参数。
- 调整航线:调整飞行航线。
- 上传航线:上传调整后的航线。
- 开始作业:点击开始作业按钮。
- 断药或断料情况,新增断点:在断药或断料时,新增断点。
- 补药或补料:补充药剂或物料。
- 飞回断点位置继续作业:飞回断点位置继续作业。
- 完成作业:作业完成后,无人机自动返航或降落。
新增地块
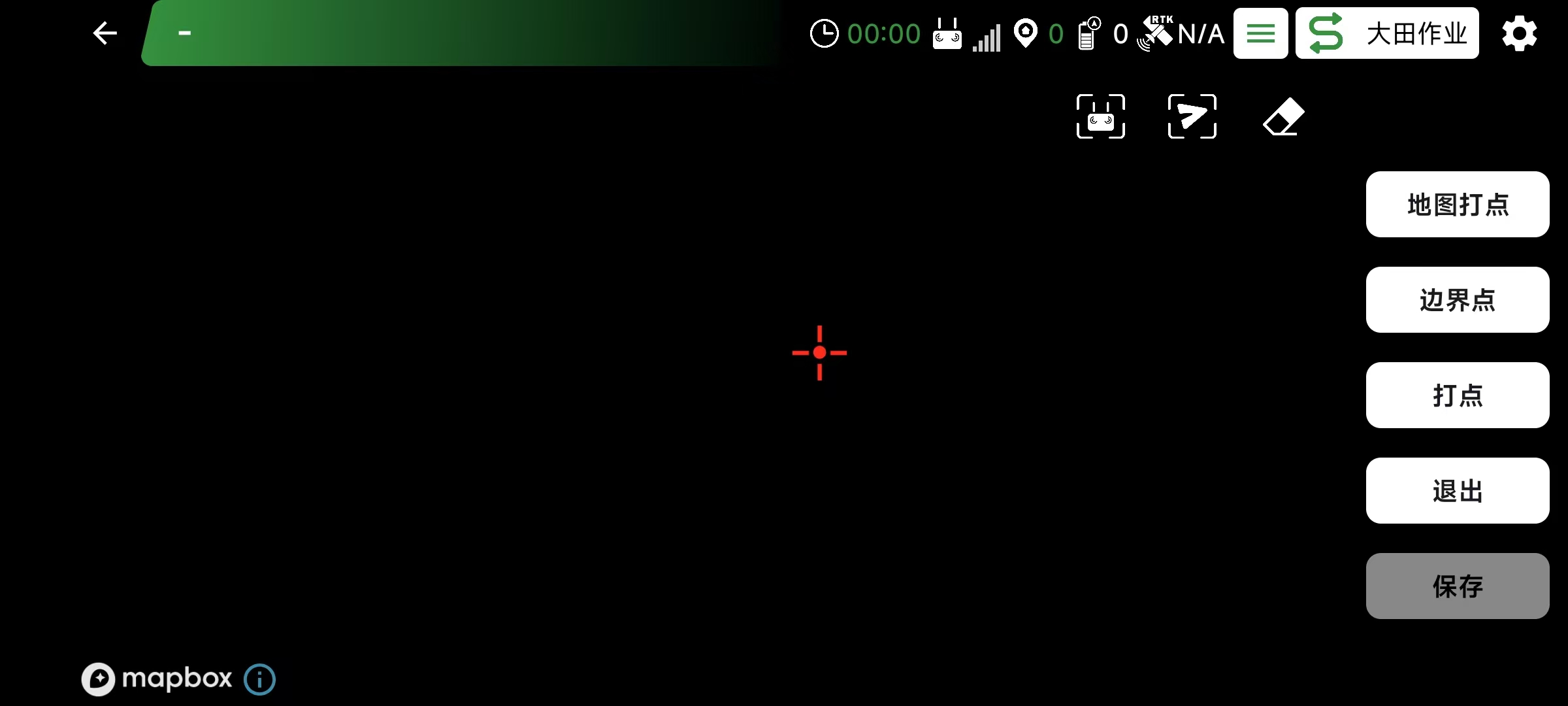
- 可以选择地图打点、飞行器打点、遥控器打点、打点器打点
- 可以选择打点类型为边界点、障碍点、原型障碍点
- 打点后点击保存,设置完地块名称即可创建成功
编辑地块

- 对地块边界进行编辑。支持新增、移动、删除边界点。
- 地块边界点需要顺序创建,地块边界线不能交叉。
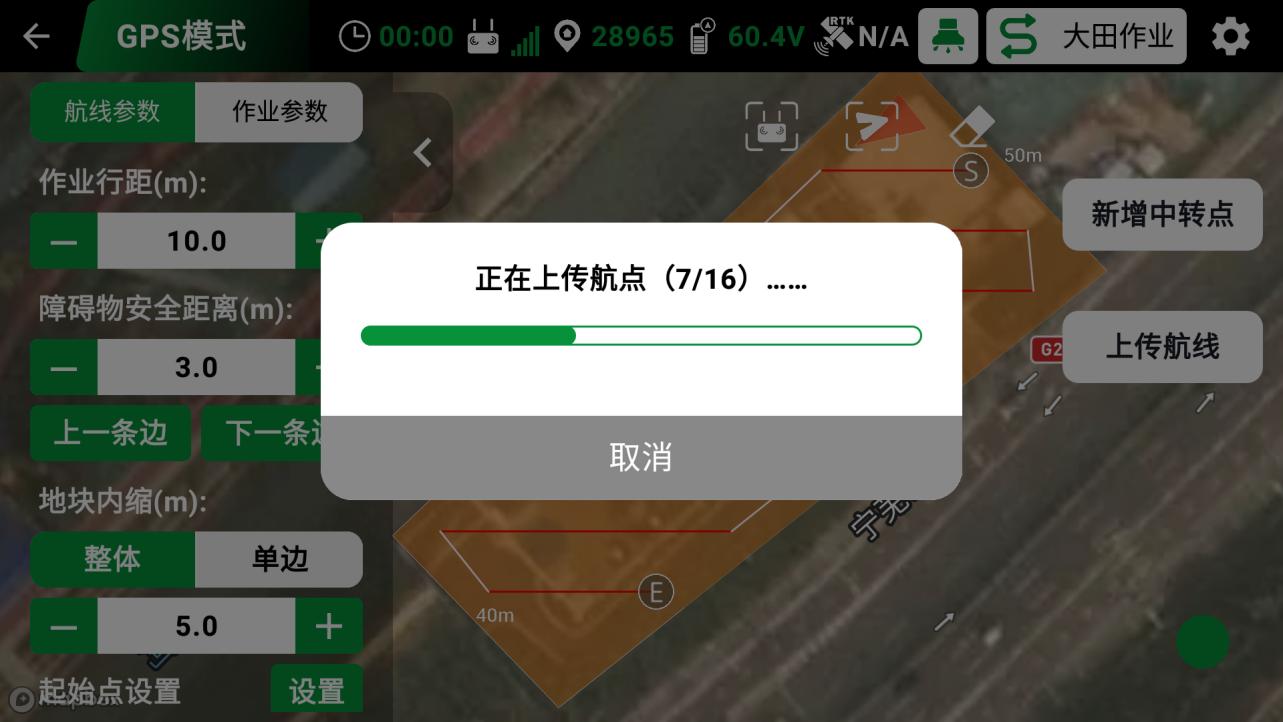
编辑参数

上传航线
飞行确认

开始大田作业
结束作业

AB作业

作业流程
- 调整作业参数
- 飞机起飞,飞到A点,打点
- 调整A点角度
- 飞机开始喷洒或播撒
- 飞机飞到B点,打点
- 调整B点角度
- 调整方向
- 开始AB点作业
作业参数
- 喷洒模式:固定 | 随速
- 水泵大小:固定模式下可设置
- 喷洒用量:随速模式下可设置
- 作业行距
- 飞行速度
- 喷头转速
操作
- 返航
- 降落
KML导入
- 点击按钮后,在文件管理中选择需要上传的KML文件。