
 Andrew Tridgell
ae8ed8cb8b
moved add_libraries.sh to scripts
Andrew Tridgell
ae8ed8cb8b
moved add_libraries.sh to scripts
|
3 жил өмнө | |
|---|---|---|
| RemoteIDModule | 3 жил өмнө | |
| images | 3 жил өмнө | |
| libraries | 3 жил өмнө | |
| modules | 3 жил өмнө | |
| releases | 3 жил өмнө | |
| scripts | 3 жил өмнө | |
| .gitignore | 3 жил өмнө | |
| .gitmodules | 3 жил өмнө | |
| BUILDING.md | 3 жил өмнө | |
| COPYING.txt | 3 жил өмнө | |
| README.md | 3 жил өмнө |
README.md
ArduPilot RemoteID Transmitter
This is an implementation of a MAVLink and DroneCAN OpenDroneID transmitter. It aims to provide a transmitter solution for the FAA standard RemoteID requrement, meeting the transmitter component of the ASTM F3586-22 Means of Compliance.
Hardware Supported
So far the only hardware that has been tested is the ESP32-S3. This devboard is being used: https://au.mouser.com/ProductDetail/356-ESP32S3DEVKTM1N8
Hardware from https://wurzbachelectronics.com/ and https://bluemark.io/ is expected to work and will be tested soon.
The pins assumed in this firmware are:
- UART TX on pin 17
- UART RX on pin 18
- CAN TX on pin 47
- CAN RX on pin 38
For CAN a suitable 1MBit bxCAN transceiver needs to be connected to the CAN TX/RX pins.
Transmission Modes
This firmware supports the following transmission modes:
- WiFi NAN (Neighbour Awareness Networking)
- Bluetooth 4 Legacy Advertising
- Bluetooth 5 Long Range + Extended Advertising
Protocols
This firmware supports communication with an ArduPilot flight controller either using MAVLink or DroneCAN.
For MAVLink the following service is used: https://mavlink.io/en/services/opendroneid.html
For DroneCAN the following messages are used: https://github.com/dronecan/DSDL/tree/master/dronecan/remoteid
The DroneCAN messages are an exact mirror of the MAVLink messages to make a dual-transport implementation easy.
Releases
Pre-built releases are in the releases folder on github
Flashing
To flash to an ESP32-S3 board use the espressif FlashTool from https://www.espressif.com/en/support/download/other-tools
if this is the first time flashing the board, you may need to hold the "boot" button down while attaching the USB cable to the USB connector marked "USB"
and then use the pre-built binary in the releases folder to flash using the following options, after selecting the COMM port that the board is attached:
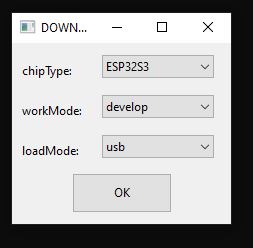

subsequent re-flashing of newer releases should not require holding the "boot" button during power-up of the board as the USB cable is attached.
ArduPilot Support
Support for OpenDroneID is in ArduPilot master and is pending for addition to the 4.2.x stable releases. You need to enable it on a board by setting "define AP_OPENDRONEID_ENABLED 1" in the hwdef.dat for your board.
Credit
Many thanks to the great work by:
- OpenDroneID: https://github.com/opendroneid/
- Steve Jack: https://github.com/sxjack/uav_electronic_ids
- Roel Schematics: https://bluemark.io/
- David Buzz: ESP32 CAN and bluetooth drivers
This firmware builds on their work.
License
This firmware is licensed under the GNU GPLv3 or later