|
@@ -9,6 +9,7 @@
|
|
|
- [2.1 飞控和各航电设备链接示意图](#21-飞控和各航电设备链接示意图)
|
|
- [2.1 飞控和各航电设备链接示意图](#21-飞控和各航电设备链接示意图)
|
|
|
- [2.2 飞控模块接口](#22-飞控模块接口)
|
|
- [2.2 飞控模块接口](#22-飞控模块接口)
|
|
|
- [2.3 常见链路或遥控器接收机连接](#23-常见链路或遥控器接收机连接)
|
|
- [2.3 常见链路或遥控器接收机连接](#23-常见链路或遥控器接收机连接)
|
|
|
|
|
+ - [2.4 遥控器与APP建立连接](#24-遥控器与app建立连接)
|
|
|
- [3 工厂模式](#3-工厂模式)
|
|
- [3 工厂模式](#3-工厂模式)
|
|
|
- [3.1 遥控设置](#31-遥控设置)
|
|
- [3.1 遥控设置](#31-遥控设置)
|
|
|
- [3.2 机型设置](#32-机型设置)
|
|
- [3.2 机型设置](#32-机型设置)
|
|
@@ -71,17 +72,16 @@
|
|
|
|
|
|
|
|
### 2.1 飞控和各航电设备链接示意图
|
|
### 2.1 飞控和各航电设备链接示意图
|
|
|
|
|
|
|
|
-* V10PRO VTOL
|
|
|
|
|
|
|
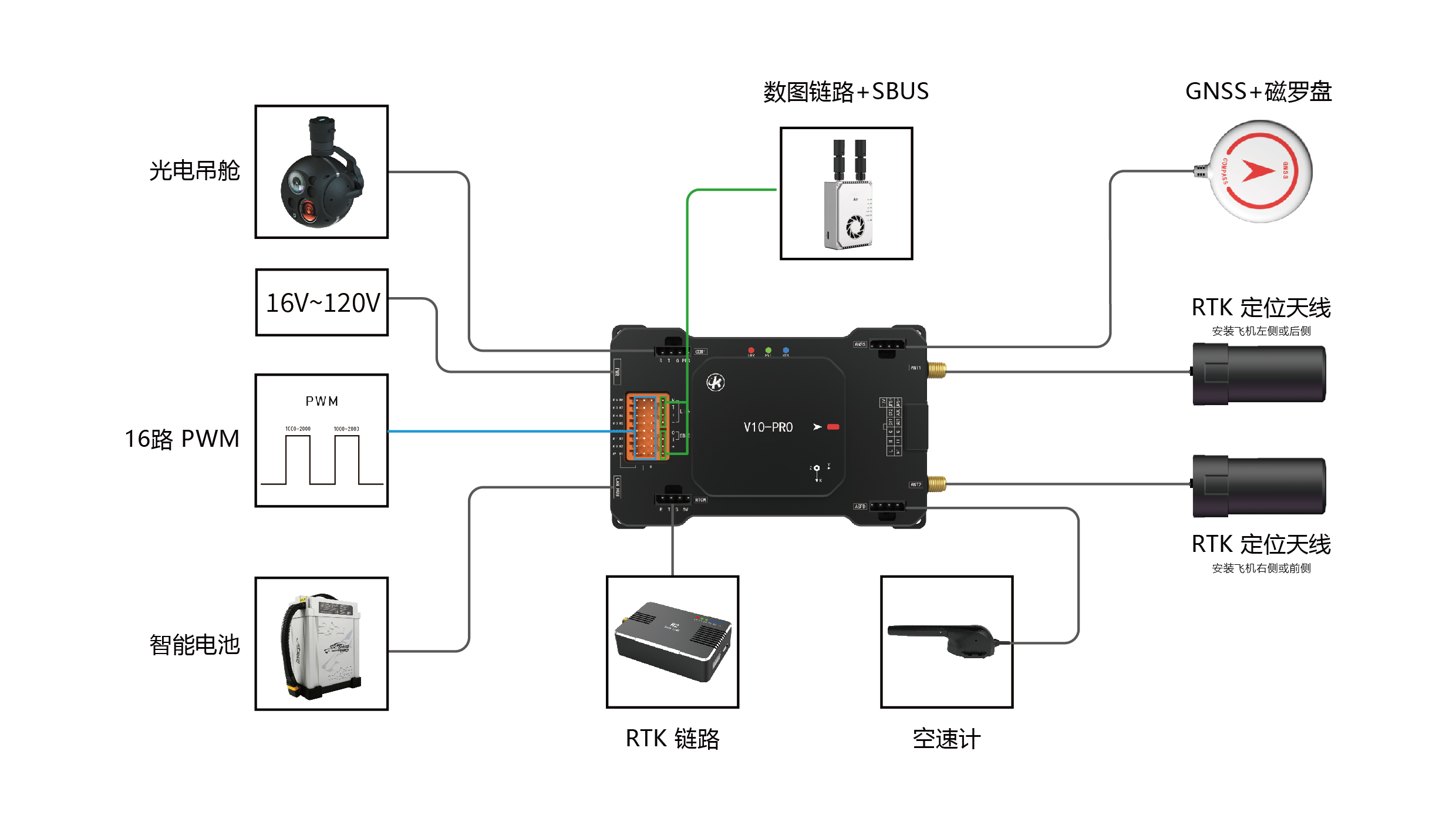
+* **V10PRO VTOL**
|
|
|
|
|
+
|
|
|
|
|
|
|
|
-
|
|
|
|
|
|
|
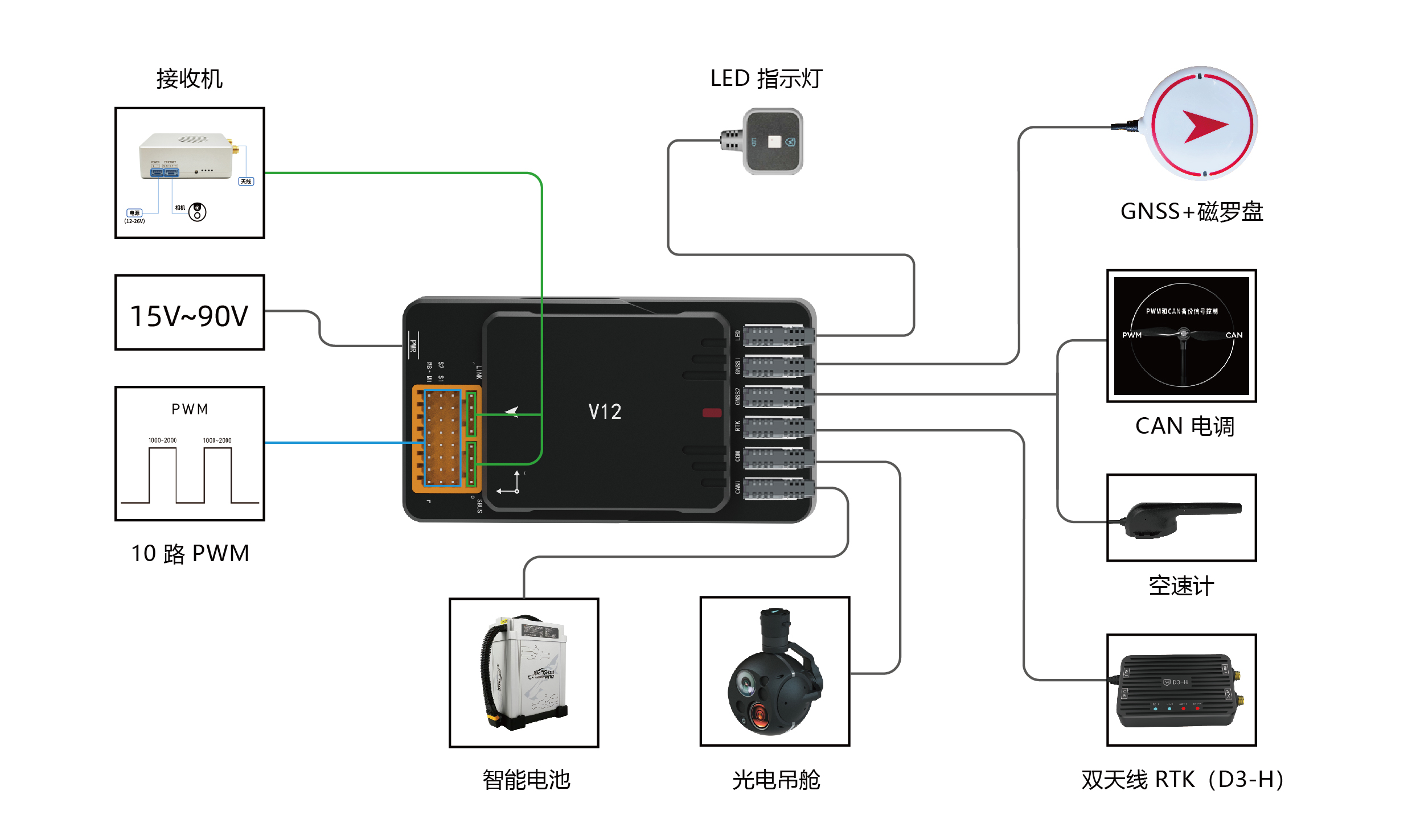
+* **V12 VTOL**
|
|
|
|
|
|
|
|
-* V12 VTOL
|
|
|
|
|
-
|
|
|
|
|
-TODO: 补充 V12的设备连接图
|
|
|
|
|
|
|
+
|
|
|
|
|
|
|
|
### 2.2 飞控模块接口
|
|
### 2.2 飞控模块接口
|
|
|
|
|
|
|
|
-* V10PRO
|
|
|
|
|
|
|
+* **V10PRO**
|
|
|
|
|
|
|
|
| 接口标识 | 说明 | 备注 |
|
|
| 接口标识 | 说明 | 备注 |
|
|
|
| ------------- | ----------------------- | ------------------------------------------------------------------------------------------------------------------------------ |
|
|
| ------------- | ----------------------- | ------------------------------------------------------------------------------------------------------------------------------ |
|
|
@@ -99,7 +99,7 @@ TODO: 补充 V12的设备连接图
|
|
|
| 尾插R1\\T1\\G | 备用遥控遥测链路串口 | 接备用链路,TTL电平,115200波特率。<br>当应用场景需双链路通信时使用(例如Link接主链路作地面站,R1T1G接遥控器数传做备份保障)。 |
|
|
| 尾插R1\\T1\\G | 备用遥控遥测链路串口 | 接备用链路,TTL电平,115200波特率。<br>当应用场景需双链路通信时使用(例如Link接主链路作地面站,R1T1G接遥控器数传做备份保障)。 |
|
|
|
| 尾插UPS | 备用供电接口 | 12V备用飞控供电。 |
|
|
| 尾插UPS | 备用供电接口 | 12V备用飞控供电。 |
|
|
|
|
|
|
|
|
-* V12
|
|
|
|
|
|
|
+* **V12**
|
|
|
|
|
|
|
|
| 接口标识 | 说明 | 备注 |
|
|
| 接口标识 | 说明 | 备注 |
|
|
|
| ------------ | ---------------- | ------------------------------------------------------------ |
|
|
| ------------ | ---------------- | ------------------------------------------------------------ |
|
|
@@ -118,37 +118,42 @@ TODO: 补充 V12的设备连接图
|
|
|
### 2.3 常见链路或遥控器接收机连接
|
|
### 2.3 常见链路或遥控器接收机连接
|
|
|
|
|
|
|
|
- 云卓**H16**
|
|
- 云卓**H16**
|
|
|
- 
|
|
|
|
|
|
|
+ 
|
|
|
- 云卓**H20/H30**
|
|
- 云卓**H20/H30**
|
|
|
- 
|
|
|
|
|
|
|
+ 
|
|
|
- 思翼**MK15/MK32**
|
|
- 思翼**MK15/MK32**
|
|
|
- 
|
|
|
|
|
|
|
+ 
|
|
|
- 远传融创**S1**
|
|
- 远传融创**S1**
|
|
|
- 
|
|
|
|
|
|
|
+ 
|
|
|
|
|
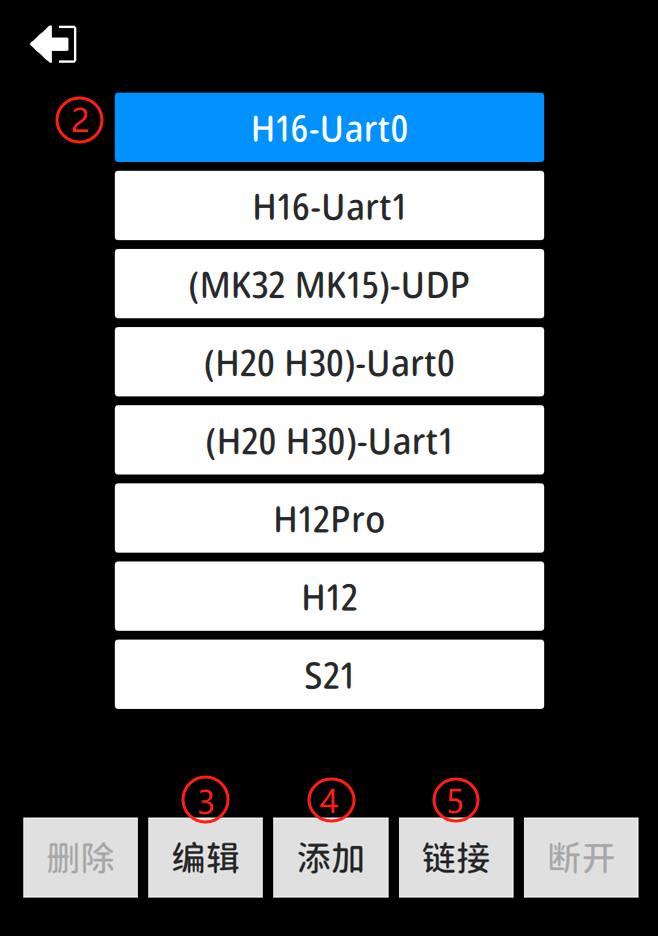
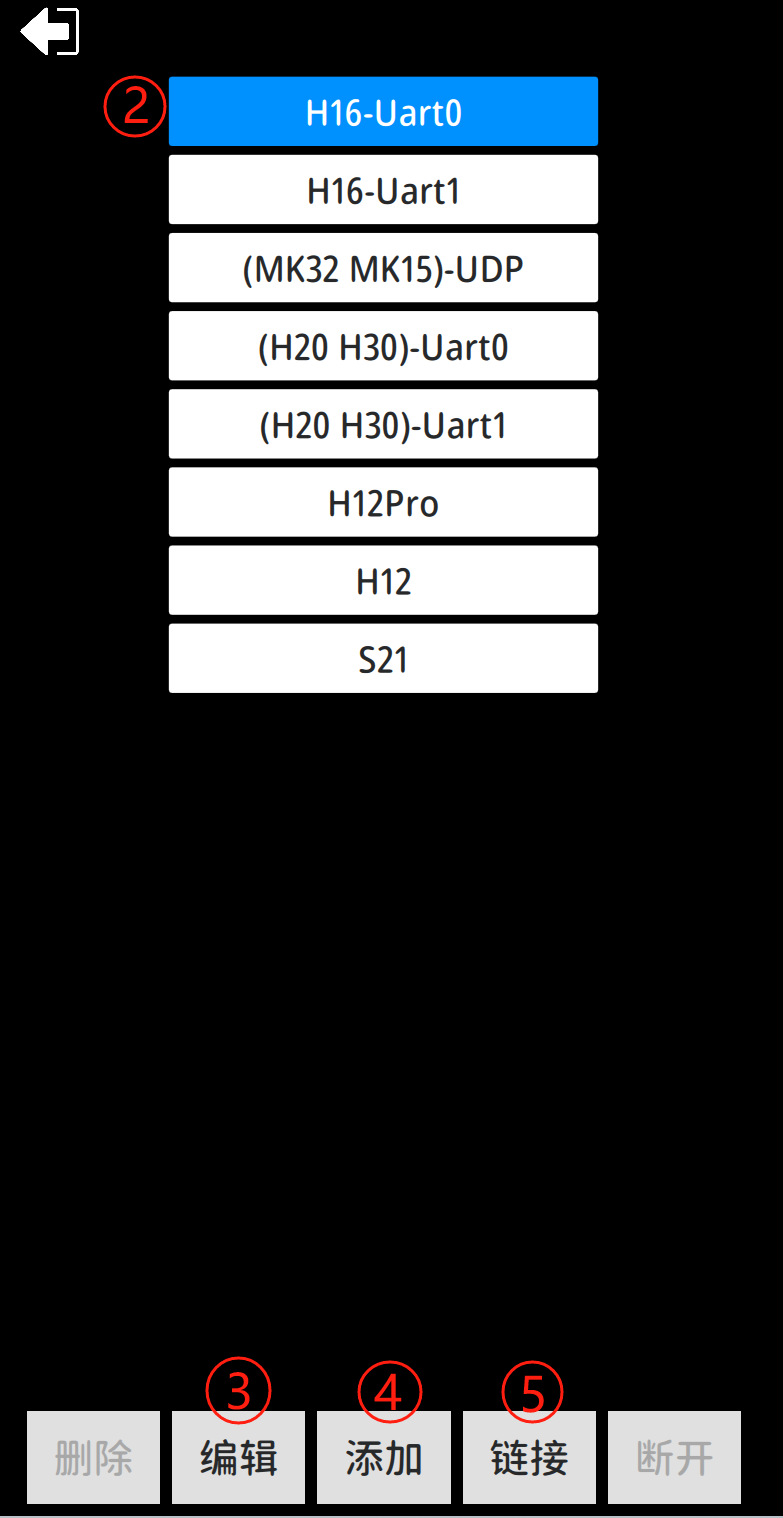
+### 2.4 遥控器与APP建立连接
|
|
|
|
|
+* 进入APP主界面后按图①所示点击红色**未连接**
|
|
|
|
|
+
|
|
|
|
|
+* 在遥控器助手将与飞控LINK口连接的串口连接方式更改为“UDP”连接,遥控器波特率如是57600、115200、230400、460800的不需要更改设置,如是其他波特率请更改成115200,H12与H12PRO遥控器默认连接方式即可,未添加的遥控器型号可按下述图示进行添加连接。
|
|
|
|
|
+
|
|
|
|
|
|
|
|
## 3 工厂模式
|
|
## 3 工厂模式
|
|
|
-
|
|
|
|
|
安装好设备后,需要进入此页面,进行各项装调参数配置。
|
|
安装好设备后,需要进入此页面,进行各项装调参数配置。
|
|
|
-默认进入密码: 88888
|
|
|
|
|
|
|
|
|
|
|
|
+默认进入密码: <span style="color:red">88888</span>
|
|
|
|
|
+
|
|
|
|
|
|
|
|
### 3.1 遥控设置
|
|
### 3.1 遥控设置
|
|
|
|
|
|
|
|
-在此页面可检查飞控是否连接到SBUS接收机的遥控器信号,对遥控器信号进行校准。
|
|
|
|
|
-
|
|
|
|
|
|
|
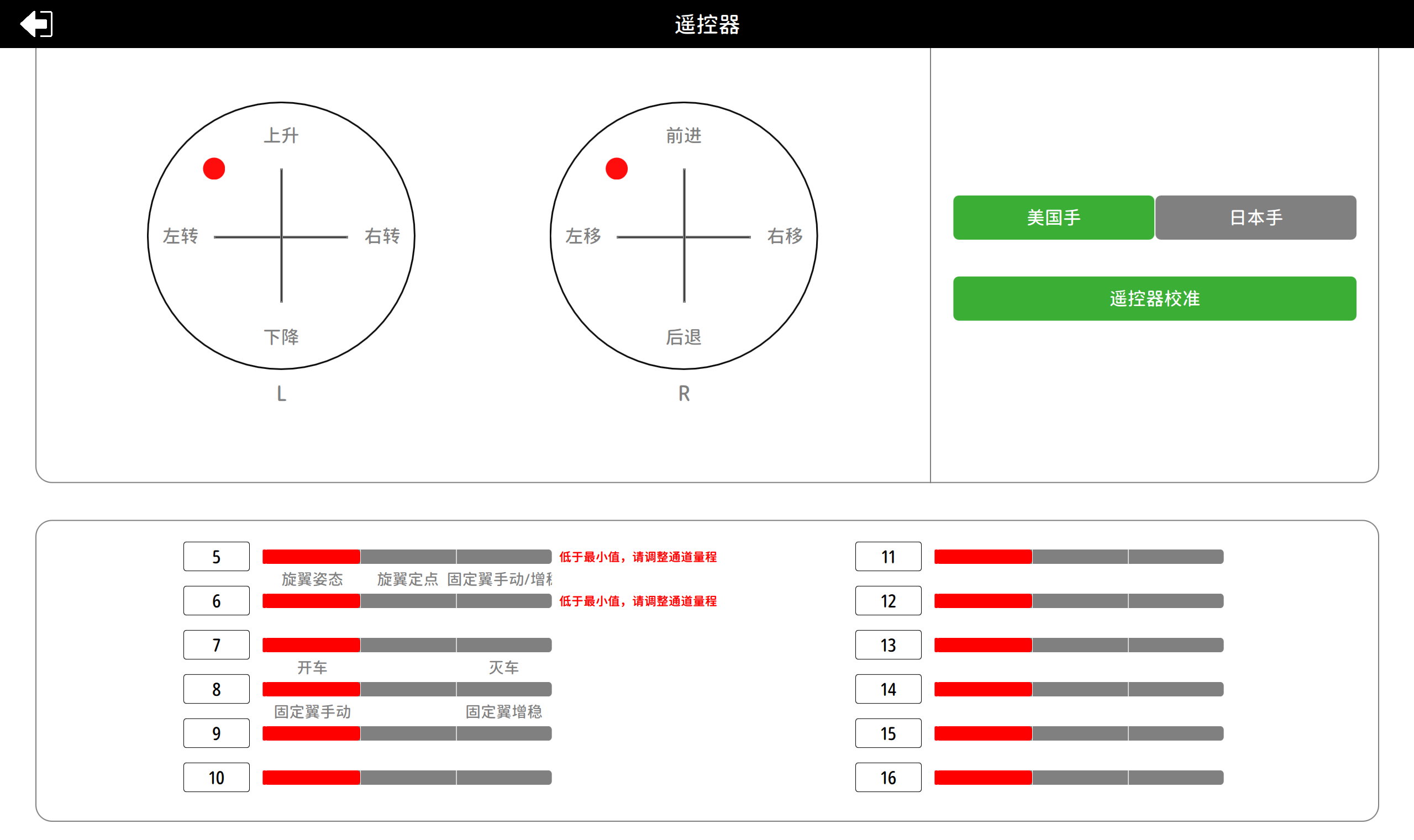
+在此页面可检查飞控是否连接到SBUS接收机的遥控器摇杆行程量,对遥控器行程进行校准。
|
|
|
|
|
+
|
|
|
|
|
|
|
|
-遥控器通道功能说明:
|
|
|
|
|
|
|
+**遥控器通道功能说明:**
|
|
|
|
|
|
|
|
-* 通道1:副翼-横滚
|
|
|
|
|
-* 通道2:升降-俯仰
|
|
|
|
|
-* 通道3:油门
|
|
|
|
|
-* 通道4:方向-航向
|
|
|
|
|
-* 通道5:模式切换
|
|
|
|
|
-* 通道6:待用
|
|
|
|
|
-* 通道7:固定翼手动油门锁
|
|
|
|
|
- 在固定翼手动模式时, 若7通道位于灭车位置, 固定翼油门舵机将保持设置的灭车值. 可用于防止在地面时固定翼转桨.
|
|
|
|
|
-* 通道8:固定翼手动增稳开关
|
|
|
|
|
- 在手动飞行固定翼时, 通过此通带在纯手动固定翼和带增稳固定翼之间切换.
|
|
|
|
|
|
|
+* **通道1**:副翼-横滚
|
|
|
|
|
+* **通道2**:升降-俯仰
|
|
|
|
|
+* **通道3**:油门
|
|
|
|
|
+* **通道4**:方向-航向
|
|
|
|
|
+* **通道5**:旋翼姿态— 旋翼定点— 手动/增稳
|
|
|
|
|
+* **通道6**:待用
|
|
|
|
|
+* **通道7**:固定翼手动油门锁
|
|
|
|
|
+ 在固定翼手动模式时, 若7通道位于灭车位置, 固定翼油门舵机将保持设置的灭车值. 可用于防止在地面时固定翼转桨。
|
|
|
|
|
+* **通道8**:固定翼手动/增稳
|
|
|
|
|
+ 在手动飞行固定翼时, 通过此通带在纯手动固定翼和带增稳固定翼之间切换。
|
|
|
|
|
|
|
|
|
|
|
|
|
**注意**:
|
|
**注意**:
|
|
@@ -167,17 +172,17 @@ TODO: 补充 V12的设备连接图
|
|
|
|
|
|
|
|
#### 3.2.1 V10PRO PWM 信号接线
|
|
#### 3.2.1 V10PRO PWM 信号接线
|
|
|
|
|
|
|
|
- * 旋翼电调
|
|
|
|
|
- 1. 四轴四桨构型旋翼电调 PWM 接线如下表。
|
|
|
|
|
|
|
+ * **旋翼电调**
|
|
|
|
|
+ I. 四轴四桨构型旋翼电调 PWM 接线如下表。
|
|
|
|
|
|
|
|
- | 电调 | 信号接口 | 备注 |
|
|
|
|
|
|
|
+ | 电调 | 信号接口 | 备注 |
|
|
|
| ---- | -------- | ---- |
|
|
| ---- | -------- | ---- |
|
|
|
| 右前 | M1 | - |
|
|
| 右前 | M1 | - |
|
|
|
| 左前 | M2 | - |
|
|
| 左前 | M2 | - |
|
|
|
| 左后 | M3 | - |
|
|
| 左后 | M3 | - |
|
|
|
| 右后 | M4 | - |
|
|
| 右后 | M4 | - |
|
|
|
|
|
|
|
|
- 2. 四轴八桨构型旋翼电调 PWM 接线如下表。
|
|
|
|
|
|
|
+ II. 四轴八桨构型旋翼电调 PWM 接线如下表。
|
|
|
|
|
|
|
|
| 电调 | 信号接口 | 备注 |
|
|
| 电调 | 信号接口 | 备注 |
|
|
|
| ---------- | -------- | ---- |
|
|
| ---------- | -------- | ---- |
|
|
@@ -190,8 +195,8 @@ TODO: 补充 V12的设备连接图
|
|
|
| 左后顺时针 | M11 | - |
|
|
| 左后顺时针 | M11 | - |
|
|
|
| 右后逆时针 | M12 | - |
|
|
| 右后逆时针 | M12 | - |
|
|
|
|
|
|
|
|
- * 固定翼舵面舵机
|
|
|
|
|
- 1. 平垂尾构型
|
|
|
|
|
|
|
+ * **固定翼舵面舵机**
|
|
|
|
|
+ I. 平垂尾构型
|
|
|
|
|
|
|
|
| 舵机 | 信号接口 | 备注 |
|
|
| 舵机 | 信号接口 | 备注 |
|
|
|
| ------ | -------- | ---- |
|
|
| ------ | -------- | ---- |
|
|
@@ -201,7 +206,7 @@ TODO: 补充 V12的设备连接图
|
|
|
| 油门 | M8 | - |
|
|
| 油门 | M8 | - |
|
|
|
| 左副翼 | M13 | - |
|
|
| 左副翼 | M13 | - |
|
|
|
|
|
|
|
|
- 2. V尾\倒V尾构型
|
|
|
|
|
|
|
+ II. V尾\倒V尾构型
|
|
|
|
|
|
|
|
| 舵机 | 信号接口 | 备注 |
|
|
| 舵机 | 信号接口 | 备注 |
|
|
|
| ------ | -------- | ---- |
|
|
| ------ | -------- | ---- |
|
|
@@ -211,7 +216,7 @@ TODO: 补充 V12的设备连接图
|
|
|
| 油门 | M8 | - |
|
|
| 油门 | M8 | - |
|
|
|
| 左副翼 | M13 | - |
|
|
| 左副翼 | M13 | - |
|
|
|
|
|
|
|
|
- 3. 三角翼构型
|
|
|
|
|
|
|
+ III. 三角翼构型
|
|
|
|
|
|
|
|
| 舵机 | 信号接口 | 备注 |
|
|
| 舵机 | 信号接口 | 备注 |
|
|
|
| ---- | -------- | ---- |
|
|
| ---- | -------- | ---- |
|
|
@@ -219,7 +224,7 @@ TODO: 补充 V12的设备连接图
|
|
|
| 左翼 | M6 | - |
|
|
| 左翼 | M6 | - |
|
|
|
| 油门 | M8 | - |
|
|
| 油门 | M8 | - |
|
|
|
|
|
|
|
|
- 4. 串列翼构型
|
|
|
|
|
|
|
+ IV. 串列翼构型
|
|
|
|
|
|
|
|
| 舵机 | 信号接口 | 备注 |
|
|
| 舵机 | 信号接口 | 备注 |
|
|
|
| ------ | -------- | ---- |
|
|
| ------ | -------- | ---- |
|
|
@@ -230,8 +235,8 @@ TODO: 补充 V12的设备连接图
|
|
|
| 左前翼 | M12 | - |
|
|
| 左前翼 | M12 | - |
|
|
|
#### 3.2.2 V12 PWM 信号接线
|
|
#### 3.2.2 V12 PWM 信号接线
|
|
|
|
|
|
|
|
- * 旋翼电调
|
|
|
|
|
- 1. 四轴四桨构型旋翼电调 PWM 接线如下表。
|
|
|
|
|
|
|
+ * **旋翼电调**
|
|
|
|
|
+ I. 四轴四桨构型旋翼电调 PWM 接线如下表。
|
|
|
|
|
|
|
|
| 电调 | 信号接口 | 备注 |
|
|
| 电调 | 信号接口 | 备注 |
|
|
|
| ---- | -------- | ---- |
|
|
| ---- | -------- | ---- |
|
|
@@ -240,12 +245,12 @@ TODO: 补充 V12的设备连接图
|
|
|
| 左后 | M3 | - |
|
|
| 左后 | M3 | - |
|
|
|
| 右后 | M4 | - |
|
|
| 右后 | M4 | - |
|
|
|
|
|
|
|
|
- 2. 四轴八桨构型旋翼电调 PWM 接线如下表。
|
|
|
|
|
|
|
+ II. 四轴八桨构型旋翼电调 PWM 接线如下表。
|
|
|
|
|
|
|
|
V12 PWM 通道不足,不支持此类构型。
|
|
V12 PWM 通道不足,不支持此类构型。
|
|
|
|
|
|
|
|
- * 固定翼舵面舵机
|
|
|
|
|
- 1. 平垂尾构型
|
|
|
|
|
|
|
+ * **固定翼舵面舵机**
|
|
|
|
|
+ I. 平垂尾构型
|
|
|
|
|
|
|
|
| 舵机 | 信号接口 | 备注 |
|
|
| 舵机 | 信号接口 | 备注 |
|
|
|
| ------ | -------- | ----------------------- |
|
|
| ------ | -------- | ----------------------- |
|
|
@@ -254,7 +259,7 @@ TODO: 补充 V12的设备连接图
|
|
|
| 方向舵 | M7 | - |
|
|
| 方向舵 | M7 | - |
|
|
|
| 油门 | M8 | - |
|
|
| 油门 | M8 | - |
|
|
|
|
|
|
|
|
- 2. V尾\\倒V尾构型
|
|
|
|
|
|
|
+ II. V尾\\倒V尾构型
|
|
|
|
|
|
|
|
| 舵机 | 信号接口 | 备注 |
|
|
| 舵机 | 信号接口 | 备注 |
|
|
|
| ------ | -------- | ---- |
|
|
| ------ | -------- | ---- |
|
|
@@ -263,7 +268,7 @@ TODO: 补充 V12的设备连接图
|
|
|
| 左尾翼 | M7 | - |
|
|
| 左尾翼 | M7 | - |
|
|
|
| 油门 | M8 | - |
|
|
| 油门 | M8 | - |
|
|
|
|
|
|
|
|
- 3. 三角翼构型
|
|
|
|
|
|
|
+ III. 三角翼构型
|
|
|
|
|
|
|
|
| 舵机 | 信号接口 | 备注 |
|
|
| 舵机 | 信号接口 | 备注 |
|
|
|
| ---- | -------- | ---- |
|
|
| ---- | -------- | ---- |
|
|
@@ -271,20 +276,20 @@ TODO: 补充 V12的设备连接图
|
|
|
| 左翼 | M6 | - |
|
|
| 左翼 | M6 | - |
|
|
|
| 油门 | M8 | - |
|
|
| 油门 | M8 | - |
|
|
|
|
|
|
|
|
- 4. 串列翼构型
|
|
|
|
|
- V12 PWM 通道不足不支持此类构型。
|
|
|
|
|
|
|
+ IV. 串列翼构型
|
|
|
|
|
+ * **V12 PWM 通道不足不支持此类构型**。
|
|
|
|
|
|
|
|
### 3.3 安装设置
|
|
### 3.3 安装设置
|
|
|
|
|
|
|
|
在此界面进行飞控模块、天线、遥控器、电调等的设置。
|
|
在此界面进行飞控模块、天线、遥控器、电调等的设置。
|
|
|
|
|
|
|
|
- <!-- 此路径表示图片和MD文件,处于同一目录 -->
|
|
|
|
|
|
|
+
|
|
|
|
|
|
|
|
#### 3.3.1. 飞控安装
|
|
#### 3.3.1. 飞控安装
|
|
|
-务必设置正确的飞控安装方向,否则将导致炸机事故。
|
|
|
|
|
|
|
+<span style="color:red">请务必设置正确的飞控安装方向,否则将导致炸机事故。</span>
|
|
|
|
|
|
|
|
#### 3.3.2 RTK安装
|
|
#### 3.3.2 RTK安装
|
|
|
-飞控ANT1和ANT2接口的天线务必按图示说明安装,不可互相装反,否则将导致炸机事故。
|
|
|
|
|
|
|
+<span style="color:red">飞控ANT1和ANT2接口的天线务必按图示说明安装,不可互相装反,否则将导致炸机事故。</span>
|
|
|
天线应安装在机身开放无遮挡位置,以达到良好的搜星效果。
|
|
天线应安装在机身开放无遮挡位置,以达到良好的搜星效果。
|
|
|
|
|
|
|
|
#### 3.3.3 GNSS安装
|
|
#### 3.3.3 GNSS安装
|
|
@@ -296,7 +301,7 @@ GNSS模块应安装在机身开放无遮挡位置,并远离电机、大电流
|
|
|
|
|
|
|
|
将飞机放置于水平地面,点击水平校准,等待两秒后,横滚俯仰角收敛到0度附近,校准完成。
|
|
将飞机放置于水平地面,点击水平校准,等待两秒后,横滚俯仰角收敛到0度附近,校准完成。
|
|
|
|
|
|
|
|
-
|
|
|
|
|
|
|
+
|
|
|
|
|
|
|
|
一般正常安装无需进行水平校准,当发现有如下现象时可进行一次水平校准。
|
|
一般正常安装无需进行水平校准,当发现有如下现象时可进行一次水平校准。
|
|
|
* 飞机姿态模式下飞行,摇杆回中后明显自主往固定方向漂移。说明飞控水平面和飞机动力面存在偏差,可进行一次水平校准。
|
|
* 飞机姿态模式下飞行,摇杆回中后明显自主往固定方向漂移。说明飞控水平面和飞机动力面存在偏差,可进行一次水平校准。
|
|
@@ -306,7 +311,7 @@ GNSS模块应安装在机身开放无遮挡位置,并远离电机、大电流
|
|
|
|
|
|
|
|
按照APP图示提示,人工抬起飞机,依次进行水平旋转和垂直旋转,按APP提示完成校磁。
|
|
按照APP图示提示,人工抬起飞机,依次进行水平旋转和垂直旋转,按APP提示完成校磁。
|
|
|
|
|
|
|
|
-
|
|
|
|
|
|
|
+
|
|
|
|
|
|
|
|
V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如下场景时可进行一次磁校准。
|
|
V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如下场景时可进行一次磁校准。
|
|
|
* 首次装机建议做一次磁校准。
|
|
* 首次装机建议做一次磁校准。
|
|
@@ -319,14 +324,14 @@ V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如
|
|
|
在此进行舵面舵机的行程和中位点调整设置。
|
|
在此进行舵面舵机的行程和中位点调整设置。
|
|
|

|
|

|
|
|
|
|
|
|
|
-* 在待命模式下, 进行舵面行程和中位点调整.
|
|
|
|
|
|
|
+* **在待命模式下, 进行舵面行程和中位点调整**
|
|
|
- 飞控上电后默认在待命模式.
|
|
- 飞控上电后默认在待命模式.
|
|
|
- 若未起飞前切换到了遥控器旋翼或固定翼手动模式, 关闭遥控器会回到待命模式.
|
|
- 若未起飞前切换到了遥控器旋翼或固定翼手动模式, 关闭遥控器会回到待命模式.
|
|
|
-* 中位点调整
|
|
|
|
|
|
|
+* **中位点调整**
|
|
|
- 点击舵面检测 "中位" 按钮, 飞控将对应舵面输出中位信号.
|
|
- 点击舵面检测 "中位" 按钮, 飞控将对应舵面输出中位信号.
|
|
|
- 观察舵面中位是否合适, 不合适则修改调整对应舵面的中位值如 "左翼中".
|
|
- 观察舵面中位是否合适, 不合适则修改调整对应舵面的中位值如 "左翼中".
|
|
|
- 注意**Y线连接的舵面需机械调整**. 因为两个舵机共享一路信号, 按其中一个调整另一个会不合适.
|
|
- 注意**Y线连接的舵面需机械调整**. 因为两个舵机共享一路信号, 按其中一个调整另一个会不合适.
|
|
|
-* 行程调整
|
|
|
|
|
|
|
+* **行程调整**
|
|
|
- 点击舵面检测 "左滚"\\"右滚"\\"抬头"\\"低头"\\"左转"\\"右转" 按钮, 飞控将对应舵面输出对应动作信号.
|
|
- 点击舵面检测 "左滚"\\"右滚"\\"抬头"\\"低头"\\"左转"\\"右转" 按钮, 飞控将对应舵面输出对应动作信号.
|
|
|
比如 "左滚", 飞控将输出左副翼上偏, 右副翼下偏. "抬头", 飞控将输出升降舵上偏最大.
|
|
比如 "左滚", 飞控将输出左副翼上偏, 右副翼下偏. "抬头", 飞控将输出升降舵上偏最大.
|
|
|
- 观察舵面行程是否合适, 不合适则修改调整对应舵面的行程值如 "左翼上".
|
|
- 观察舵面行程是否合适, 不合适则修改调整对应舵面的行程值如 "左翼上".
|
|
@@ -341,28 +346,28 @@ V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如
|
|
|
|
|
|
|
|

|
|

|
|
|
通常默认的感度参数,适应大部分飞机飞行情况。
|
|
通常默认的感度参数,适应大部分飞机飞行情况。
|
|
|
- 一些调参的指导意见:
|
|
|
|
|
|
|
+ 一些调参的指导建议:
|
|
|
|
|
|
|
|
1. 除了“感度设置”内的参数,针对不同的动力和飞机平台需要调整。其它参数大部分情况下都无需修改。
|
|
1. 除了“感度设置”内的参数,针对不同的动力和飞机平台需要调整。其它参数大部分情况下都无需修改。
|
|
|
2. 当机身较低频的晃动时,可适当增加“横滚姿态自稳”,“俯仰姿态自稳”。每次加减10\~20。可适当增加“横滚阻尼”,“俯仰阻尼”,每次加减1\~2。
|
|
2. 当机身较低频的晃动时,可适当增加“横滚姿态自稳”,“俯仰姿态自稳”。每次加减10\~20。可适当增加“横滚阻尼”,“俯仰阻尼”,每次加减1\~2。
|
|
|
3. 当机身较高频率颤动时,可适当减小“横滚姿态自稳”,“俯仰姿态自稳”,每次加减10\~20。可适当减小“横滚阻尼”,“俯仰阻尼”,每次加减1\~2。
|
|
3. 当机身较高频率颤动时,可适当减小“横滚姿态自稳”,“俯仰姿态自稳”,每次加减10\~20。可适当减小“横滚阻尼”,“俯仰阻尼”,每次加减1\~2。
|
|
|
4. 当手动打杆回中,飞机表现来回晃一两次,再收敛到水平姿态。可适当增加“横滚阻尼”,“俯仰阻尼”,每次加减1\~2。
|
|
4. 当手动打杆回中,飞机表现来回晃一两次,再收敛到水平姿态。可适当增加“横滚阻尼”,“俯仰阻尼”,每次加减1\~2。
|
|
|
-5. 特殊需求情况联系商务和技术支持,提供飞机平台的电调型号、轴距、起飞重量、桨叶尺寸信息,我们将提供合适的参数参考回复。
|
|
|
|
|
|
|
+5. 特殊需求情况联系商务和技术支持,提供飞机平台的电调型号、轴距、起飞重量、桨叶尺寸信息,我们将提供合适的参数供参考。
|
|
|
|
|
|
|
|
|
|
|
|
|
#### 3.4.3 固定翼参数设置
|
|
#### 3.4.3 固定翼参数设置
|
|
|
|
|
|
|
|
-* 在此页面进行飞控固定翼的控制相关感度参数设置.
|
|
|
|
|
|
|
+* 在此页面进行固定翼的控制相关感度参数设置.
|
|
|
|
|
|
|
|

|
|

|
|
|
|
|
|
|
|
通常默认的感度参数,适应大部分飞机飞行情况。
|
|
通常默认的感度参数,适应大部分飞机飞行情况。
|
|
|
一些调参的建议:
|
|
一些调参的建议:
|
|
|
|
|
|
|
|
- 1. "L1周期" 参数
|
|
|
|
|
|
|
+ I. "L1周期" 参数
|
|
|
通常较灵活的小型飞机, 如翼展3米以下, 周期偏小 2000~2300. 中大型一些在 2200~2500 范围.
|
|
通常较灵活的小型飞机, 如翼展3米以下, 周期偏小 2000~2300. 中大型一些在 2200~2500 范围.
|
|
|
该参数越小, 航迹控制越强, 但过小会出现航迹震荡. 调整时每次可增减100.
|
|
该参数越小, 航迹控制越强, 但过小会出现航迹震荡. 调整时每次可增减100.
|
|
|
- 2. "L1阻尼" 参数
|
|
|
|
|
|
|
+ II. "L1阻尼" 参数
|
|
|
一般默认 80 适合大多数飞机, 转弯灵活的小型飞机可取 75. 通常在70~80 范围.
|
|
一般默认 80 适合大多数飞机, 转弯灵活的小型飞机可取 75. 通常在70~80 范围.
|
|
|
该参数越小, 航迹控制越强, 但过小会出现航迹震荡. 调整时以每次可增减5.
|
|
该参数越小, 航迹控制越强, 但过小会出现航迹震荡. 调整时以每次可增减5.
|
|
|
|
|
|
|
@@ -373,23 +378,23 @@ V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如
|
|
|
|
|
|
|
|
一些调参建议:
|
|
一些调参建议:
|
|
|
|
|
|
|
|
- * "固定翼盘旋半径" 参数:
|
|
|
|
|
- 该参数用于在未指定盘旋半径时, 飞控将使用的默认盘旋半径. **注意应按飞机实际情况进行设置. 巡航速度快的飞机需要更大的盘旋半径.**
|
|
|
|
|
|
|
+ * **"固定翼盘旋半径"** 参数:
|
|
|
|
|
+ 该参数用于在未指定盘旋半径时, 飞控将使用的默认盘旋半径. <span style="color:red">注意应按飞机实际情况进行设置. 巡航速度快的飞机需要更大的盘旋半径。</span>
|
|
|
|
|
|
|
|
- * "固定翼失速空速" 参数:
|
|
|
|
|
- 该参数表示飞机将无法维持正常固定翼气动姿态飞行的空速. 固定翼时低于此空速飞控将触发保护返航. **此参数由飞机的气动设计决定, 需咨询飞机制造商给与正确的参考值.**
|
|
|
|
|
|
|
+ * **"固定翼失速空速"** 参数:
|
|
|
|
|
+ 该参数表示飞机将无法维持正常固定翼气动姿态飞行的空速. 固定翼时低于此空速飞控将触发保护返航.<span style="color:red">此参数由飞机的气动设计决定, 需咨询飞机制造商给与正确的参考值。</span>
|
|
|
|
|
|
|
|
- * "固定翼最小空速" 参数:
|
|
|
|
|
- 该参数表示飞机可维持固定翼平飞的最小速度. 飞控在旋翼-固定翼模态转换时将此空速作为转换成功的阈值空速. **此参数由飞机的气动设计决定, 需咨询飞机制造商给与正确的参考值.**
|
|
|
|
|
|
|
+ * **"固定翼最小空速"** 参数:
|
|
|
|
|
+ 该参数表示飞机可维持固定翼平飞的最小速度. 飞控在旋翼-固定翼模态转换时将此空速作为转换成功的阈值空速. <span style="color:red">此参数由飞机的气动设计决定, 需咨询飞机制造商给与正确的参考值。</span>
|
|
|
|
|
|
|
|
- * "固定翼巡航空速" 参数:
|
|
|
|
|
- 该参数表示飞机常态固定翼平飞的巡航速度. 在未指定巡航速度时, 飞控将使用此值作为固定翼飞行空速.
|
|
|
|
|
|
|
+ * **"固定翼巡航空速"** 参数:
|
|
|
|
|
+ 该参数表示飞机常态固定翼平飞的巡航速度. 在未指定巡航速度时, 飞控将使用此值作为固定翼飞行空速。
|
|
|
|
|
|
|
|
- * "切换固定翼最大油门" 参数:
|
|
|
|
|
- 该参数表示飞控在由旋翼切换为固定翼模态时, 固定翼油门保持的最大值. 过渡态时固定翼将保持此油门值. 到达 "固定翼最小空速" 空速后, 飞控将自动切换为纯固定翼模态, 油门进行反馈自动控制.
|
|
|
|
|
|
|
+ * **"切换固定翼最大油门"** 参数:
|
|
|
|
|
+ 该参数表示飞控在由旋翼切换为固定翼模态时, 固定翼油门保持的最大值. 过渡态时固定翼将保持此油门值. 到达 "固定翼最小空速" 空速后, 飞控将自动切换为纯固定翼模态, 油门进行反馈自动控制。
|
|
|
|
|
|
|
|
- * "切换固定翼超时时间" 参数:
|
|
|
|
|
- 该参数表示飞控在由旋翼切换为固定翼模态最长允许耗时. 当开始旋翼转换固定翼后, 若超过此时间空速仍达不到 "固定翼最小空速" 空速, 飞控将回到旋翼模态并返航.
|
|
|
|
|
|
|
+ * **"切换固定翼超时时间"** 参数:
|
|
|
|
|
+ 该参数表示飞控在由旋翼切换为固定翼模态最长允许耗时. 当开始旋翼转换固定翼后, 若超过此时间空速仍达不到 "固定翼最小空速" 空速, 飞控将回到旋翼模态并返航。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
@@ -408,10 +413,10 @@ V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如
|
|
|
|
|
|
|
|
在此页面可对智能电池信息进行查看。
|
|
在此页面可对智能电池信息进行查看。
|
|
|
|
|
|
|
|
-
|
|
|
|
|
|
|
+
|
|
|
|
|
|
|
|
-飞控与格式、海盈、智安等电池厂家进行了智能电池CAN协议适配,与智能电池通过CAN-HUB接口进行对接。
|
|
|
|
|
-支持同时接入多电池(最多5个,智能电池厂家需按协议做好电池ID自分配)。
|
|
|
|
|
|
|
+飞控与格氏、海盈、智安等电池厂家进行了智能电池CAN协议适配,与智能电池通过CAN-HUB接口进行对接。
|
|
|
|
|
+支持同时接入多电池(**最多5个,智能电池厂家需按协议做好电池ID自分配**)。
|
|
|
|
|
|
|
|
### 4.3 吊舱
|
|
### 4.3 吊舱
|
|
|
|
|
|
|
@@ -419,7 +424,7 @@ V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如
|
|
|
|
|
|
|
|

|
|

|
|
|
|
|
|
|
|
-若使用的吊舱型号不在列表中,选择“其它型号”,并根据吊舱说明书中的说明填写吊舱视频流地址。
|
|
|
|
|
|
|
+若使用的吊舱型号不在列表中,选择“其它型号”将吊舱视频码流改成H265,并根据吊舱说明书中的说明填写吊舱视频流地址。
|
|
|
|
|
|
|
|
### 4.6 遥控器
|
|
### 4.6 遥控器
|
|
|
|
|
|
|
@@ -429,10 +434,10 @@ V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如
|
|
|
|
|
|
|
|
飞控可通过支持SBUS的遥控器进行手动飞行,手动飞行有旋翼姿态模式、旋翼定点模式、固定翼手动、固定翼增稳四种模式.
|
|
飞控可通过支持SBUS的遥控器进行手动飞行,手动飞行有旋翼姿态模式、旋翼定点模式、固定翼手动、固定翼增稳四种模式.
|
|
|
|
|
|
|
|
-- 旋翼姿态模式:摇杆对应飞机目标飞行姿态。摇杆回中时保持飞机姿态水平,油门定高,位置不锁定。当有外界扰动如风吹时会有位置漂移.
|
|
|
|
|
-- 旋翼定点模式:摇杆对应飞机目标飞行速度。摇杆回中时保持飞机定点,油门定高.
|
|
|
|
|
-- 固定翼手动:摇杆直接控制飞机固定翼舵面和油门,没有飞控自动增稳参与.
|
|
|
|
|
-- 固定翼增稳:遥控对应飞机目标飞行姿态, 油门对应飞机飞行空速. 油门中位时为设定的固定翼巡航空速.
|
|
|
|
|
|
|
+- **旋翼姿态模式**:摇杆对应飞机目标飞行姿态。摇杆回中时保持飞机姿态水平,油门定高,位置不锁定。当有外界扰动如风吹时会有位置漂移.
|
|
|
|
|
+- **旋翼定点模式**:摇杆对应飞机目标飞行速度。摇杆回中时保持飞机定点,油门定高.
|
|
|
|
|
+- **固定翼手动**:摇杆直接控制飞机固定翼舵面和油门,没有飞控自动增稳参与.
|
|
|
|
|
+- **固定翼增稳**:遥控对应飞机目标飞行姿态, 油门对应飞机飞行空速. 油门中位时为设定的固定翼巡航空速.
|
|
|
|
|
|
|
|
快速开始手动飞行的步骤:
|
|
快速开始手动飞行的步骤:
|
|
|
|
|
|
|
@@ -473,11 +478,11 @@ V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如
|
|
|
|
|
|
|
|

|
|

|
|
|
|
|
|
|
|
-2. 在地图规划选取航点后, 点击左边栏按钮, 对航点属性进行进一步修改.
|
|
|
|
|
|
|
+2. 在地图规划选取航点后, 点击左边栏按钮, 对航点属性进行进一步修改.可进行单个航点以及批量航点属性更改
|
|
|
|
|
|
|
|

|
|

|
|
|
|
|
|
|
|
-3. 设置完航点后, 点击 "上传航线" 将任务航线航点上传给飞控.
|
|
|
|
|
|
|
+3. 设置完航点后, 点击 "上传航线" 将任务航线航点上传至飞控.
|
|
|
|
|
|
|
|
### 6.2 航线返航盘旋航线
|
|
### 6.2 航线返航盘旋航线
|
|
|
|
|
|


{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}
{kind=link}