
 842779719
fcf14af93f
文档修改
842779719
fcf14af93f
文档修改
|
5 bulan lalu | |
|---|---|---|
| pics | 5 bulan lalu | |
| readme.md | 5 bulan lalu |
readme.md
V10APP说明书
- V10APP说明书
- 1 设备清单
- 2 安装调试
- 2.1 飞控和各航电设备链接示意图
- 2.2 飞控模块接口
- 2.4 常见链路或遥控器接收机连接
- 2.3 遥控器与APP建立连接
- 2.4 4G模块与APP/PC地面站连接
- 3. 工厂模式
- 3.1 遥控设置
- 3.2 机型设置
- 3.3 安装设置
- 3.4 参数设置
- 3.5 电机设置
- 3.6 飞行设置
- 4 设备管理
- 4.1 飞控
- 4.2 载荷
- 4.3 电池
- 4.4 雷达
- 4.5 吊舱
- 5 手动飞行
- 6 飞行界面介绍
- 7 物流作业
- 7.1 手动物流
- 7.2 AB物流
- 7.3 多点物流
- 8 巡查作业
- 8.1 手动巡查
- 8.2 指点巡查
- 8.3 航线巡查
- 9 一站多机和编队飞行
- 9.1 多机相关设置
- 9.2 多机飞行操作
- 9.3 编队飞行操作
- 9.4 多机联吊操作
1 设备清单
| 模块设备 | 型号 | 数量 |
|---|---|---|
| 主控 | V10-PRO | 1 |
| RTK定位天线及馈线 | RTK-ANT | 2 |
| 普通GPS模块 | GNSS | 1 |
| 尾插连接器 | - | - |
2 安装调试
2.1 飞控和各航电设备链接示意图
V10 PRO链接图

2.2 飞控模块接口
| 接口标识 | 说明 | 备注 |
|---|---|---|
| PWR | 飞控供电输入 | 16~120V宽压输入供电。 该接口具备电压采集能力。 |
| M1~M16 | PWM信号接口 | 接电调、舵机等执行机构设备。 具体电调接入哪个接口,参考地面站软件中机型设置标识。 注意,V10-PRO主控杜邦排插第二排为M9~M16的PWM信号。 |
| Link | 遥控遥测串口 | 接数传链路,TTL电平,115200波特率。 |
| SBUS.I | SBUS信号输入 | 接遥控器sbus接收机信号输出。 |
| SBUS.O | SBUS信号输出 | 接可用sbus信号控制的吊舱等设备,如思翼Z10吊舱。 该接口信号与SBUS.I一致。用户可通过遥控器直接控制该接口对接的吊舱等设备。 |
| GNSS | GNSS-CAN模块接口 | 接GNSS模块。 |
| ASPD | ASPD-CAN模块接口 | 接空速计模块,好盈CAN电调数据,或其他500k CAN设备数据。 |
| RTCM | 基站差分数据接口 | 接RTK基站差分链路机载端,或4G网络RTK机载模块。用于接收差分基站数据。 |
| COM1 | 载荷链路串口 | TTL串口,可接入载荷,向载荷发送飞控航姿状态数据。 线序R-Rx T-Tx G-地 PPS-GPS秒脉冲信号。 |
| ANT1\ANT2 | 飞控内置RTK板卡天线接口 | ANT1为主定位天线,左右安装时位于机体中心左侧,前后安装时位于机体中心后侧。 ANT2为主定向天线。左右安装时位于机体中心右侧,前后安装时位于机体中心前侧。 |
| 尾插R1\T1\G | 备用遥控遥测链路串口 | 接备用链路,TTL电平,115200波特率。 当应用场景需双链路通信时使用(例如Link接主链路作地面站,R1T1G接遥控器数传做备份保障)。 |
| 尾插UPS | 备用供电接口 | 外接12V电源给飞控的备用供电。 |
| 尾插 SI1 SIO | 发动机转速 油量监测 |
2.4 常见链路或遥控器接收机连接
- 云卓H16

- 云卓H20/H30

- 云卓G20

- 云卓H12PRO
- 思翼MK15/MK32

- 远传融创S1

- 远传融创S21

- 思翼UniRC 7
 思翼RC7需在遥控器助手里选择连接方式为 UDP,服务器地址中填入 192.168.144.20:19856 并添加服务,端口改为 0 保存连接设置并链接。
思翼RC7需在遥控器助手里选择连接方式为 UDP,服务器地址中填入 192.168.144.20:19856 并添加服务,端口改为 0 保存连接设置并链接。
2.3 遥控器与APP建立连接
- 进入APP主界面后按图①所示点击红色未连接

- 在遥控器助手将与飞控LINK口连接的串口连接方式更改为“UDP”连接,遥控器波特率如是57600、115200、230400、460800的不需要更改设置,如是其他波特率请更改成115200,H12与H12PRO遥控器默认连接方式即可,未添加的遥控器型号可按下述图示进行添加连接
2.4 4G模块与APP/PC地面站连接
- 点击添加,增加一个新的连接
- 连接名:任意取名
- 通信类型:4G
- 服务地址:119.3.48.216
- 端口: 8028
- 许可证:空白
- 用户名:输入账号(注册时的手机号)
- 密码:注册时的密码
- 点击登录:会自动获取该账户名下的所有 4G 模块列表
- 选择4G模块,会自动生成许可证,点击确认。
选择刚才建立的 4G 通信连接端口,点链接即可看到未连接已变为已连接状态
3. 工厂模式
安装好设备后,需要进入此页面,进行各项装调参数配置。
默认进入密码:88888

3.1 遥控设置
在此页面可检查飞控是否连接到SBUS接收机的遥控器信号,对遥控器行程进行校准。
默认5通道模式为 姿态——GNSS/北斗——自动悬停 姿态为定高不定点模式,GNSS/北斗是GPS定高定点, 自动悬停是切给地面站进行飞机控制,在此模式下除了模式切换开关,遥控器其他摇杆不参与飞行控制
默认6通道模式为 待命——返航
注意:
- 此页面的美国手、日本手选择仅修改摇杆示意图中油门、航向通道的显示位置。如需真正修改遥控器手型,需在遥控器本身的APP或设置内进行修改。
- 检查横滚、俯仰、油门、航向摇杆动作方向和摇杆图示是否一致,不一致需要在遥控器本身设置中将对应通道进行反向。
- 大部分遥控器的默认行程,都可直接使用无需修改。一般可将遥控器本身行程设置为1000~2000。
飞控使用了遥控器5、6通道进行模式切换和返航触发,7~16通道都可按用户需求用于其它用途。
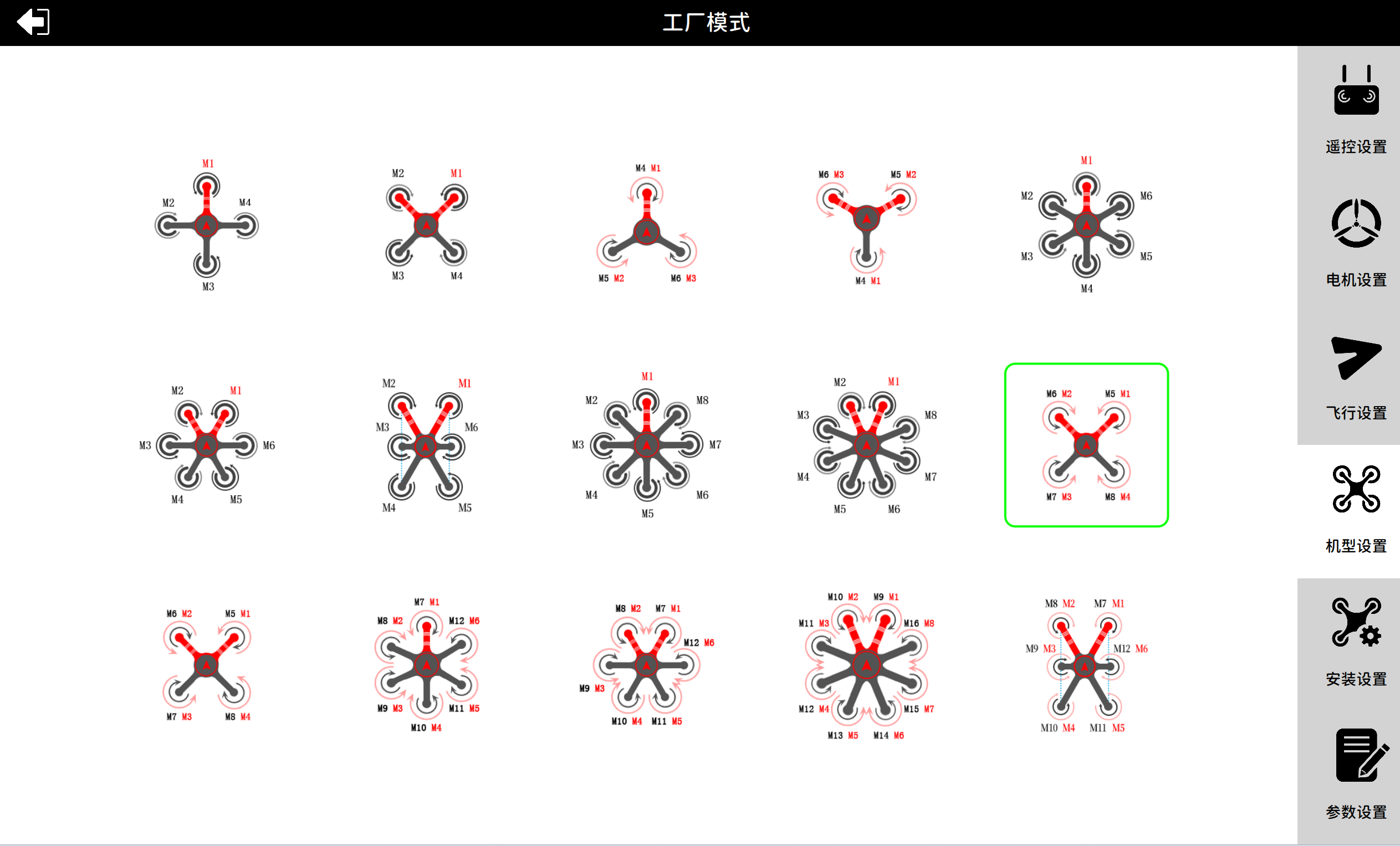
3.2 机型设置
在此页面进行机型的选择。
注意事项
按照图示电机转向连接对应的电调信号。例如:
- M1为X4轴8桨右前机臂,逆时针电机信号;
- M5为X4轴8桨右前机臂,顺时针电机信号;
请务必选择正确的机型,并正确按照机型图示连接电调信号线,否则将导致炸机事故。
3.3 安装设置
在此界面进行飞控模块、天线、遥控器、电调等的设置。

飞控安装
- 请务必设置正确的飞控安装方向、RTK天线安装方向,否则将导致炸机事故。
- 飞行前请在飞行界面进行飞机姿态检查,飞机向左侧倾斜姿态角为负值向右侧倾斜为正值,飞机抬头为正值低头为负值, 将飞机一侧抬起让飞机进行倾斜来检查姿态角验证飞控安装方向设置是否正确。
RTK安装
- 飞控ANT1和ANT2接口的天线务必按图示说明安装,不可互相装反,否则将导致炸机事故。
- 天线应安装在机身开放无遮挡位置,以达到良好的搜星效果。
- RTK天线如果选择左右安装时,ANT1在机体中心左侧,ANT2在机体中心右侧。 前后安装时,ANT1在机体中心后侧,ANT2在机体中心前侧。RTK两天线之间安装距离要求≥30公分
GNSS安装
- 按图示和红色字体说明,设置安装位置偏差补偿参数,会有更精准的飞行性能;
- GNSS模块内含磁罗盘,箭头必须指向机头前方。
- GNSS模块应安装在机身开放无遮挡位置,并远离电机、大电流线缆、钢铁材质物体,以达到良好的搜星和磁测向效果。
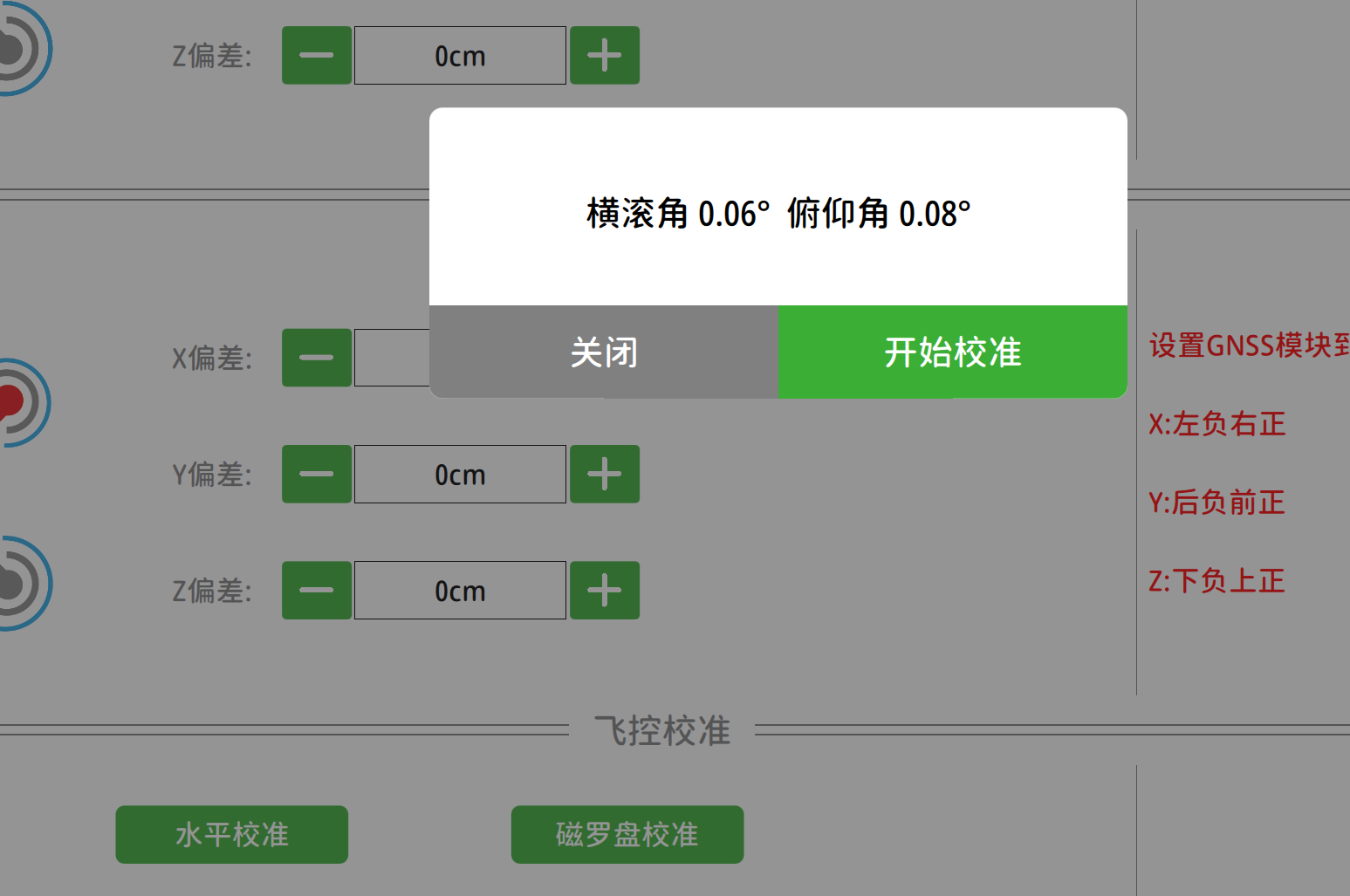
水平校准和磁校准
水平校准:
将飞机放置于水平地面,点击水平校准,等待两秒后,横滚俯仰角收敛到0度附近,校准完成点击取消即可。
一般正常安装无需进行水平校准,当发现有如下现象时可进行一次水平校准。
飞机姿态模式下飞行,摇杆回中后明显自主往固定方向漂移,说明飞控水平面和飞机动力面存在偏差,可进行一次水平校准。
飞机放置水平地面,飞控横滚俯仰姿态数据超过2度,可进行一次水平校准。
磁校准 按照APP图示提示,人工抬起飞机,依次进行水平和垂直旋转校准,垂直校准时机头冲上或者冲下均可,按APP提示完成校准,校准完成后断电重启飞控。 1.水平校准
 2.垂直校准
2.垂直校准
 V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如下场景时可进行一次磁校准。
V10-PRO飞控配置了双天线测向,一般无需进行磁校准。当有如下场景时可进行一次磁校准。首次装机建议做一次磁校准。
APP报磁干扰相关警告,可进行一次磁校准。
3.4 参数设置
在此页面进行飞控的控制相关感度参数调整,可根据使用的动力套装品牌型号一键导入参数,如遇飞行状态不理想情况,可进行对应参数微调。
未增加动力套装PID参数,通常用默认的感度参数,默认的感度参数适应大部分飞机飞行。对于用默认参数进行飞行,状态不理想的可以联系我们,会给出一些调参的指导建议
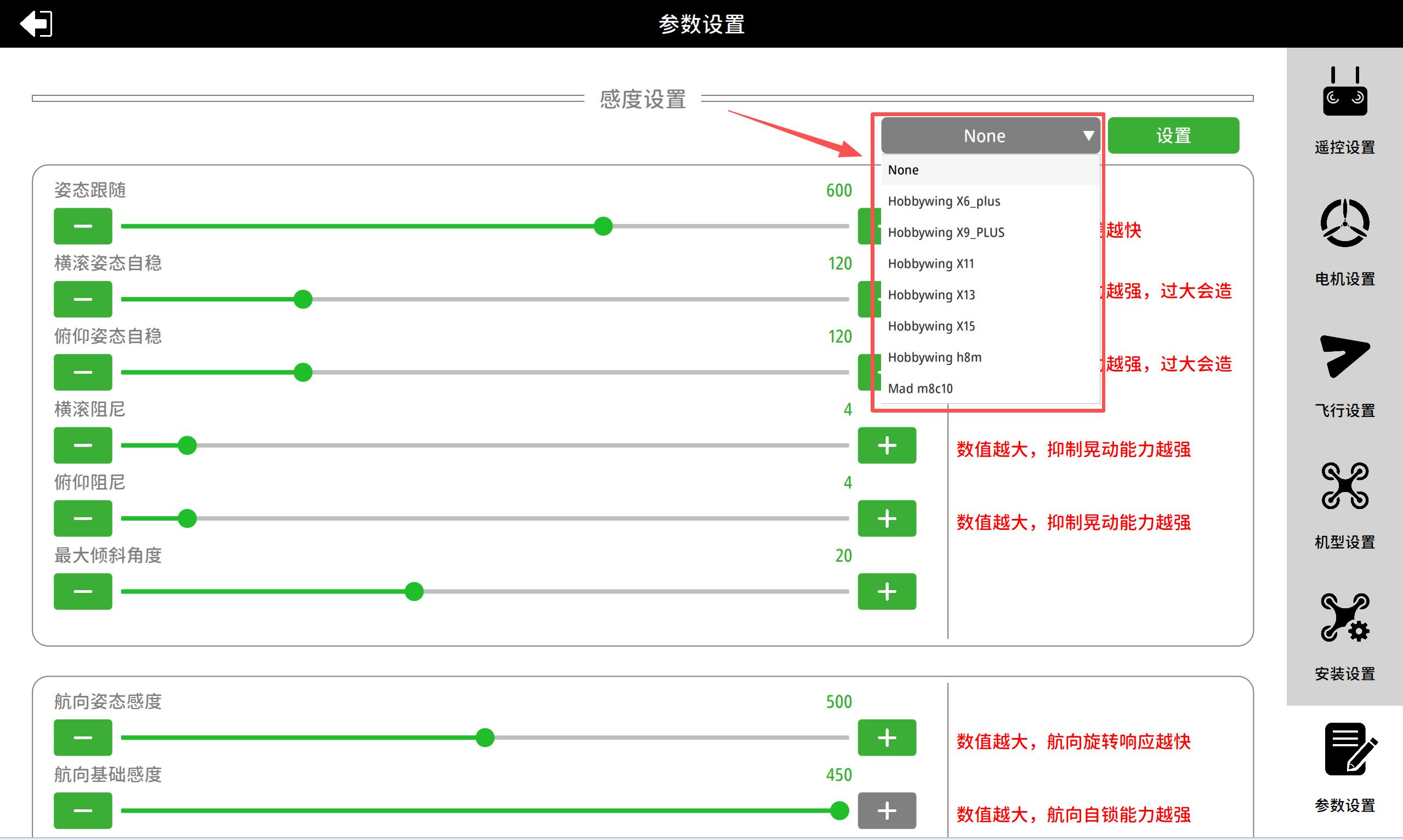
- 除了“感度设置”内的参数,针对不同的动力和飞机平台需要调整。其它参数大部分情况下都无需修改。
- 当机身较低频的晃动时,可适当增加“横滚姿态自稳”,“俯仰姿态自稳”。每次加减10~20。可适当增加“横滚阻尼”,“俯仰阻尼”,每次加减1~2。
- 当机身较高频率颤动时,可适当减小“横滚姿态自稳”,“俯仰姿态自稳”,每次加减10~20。可适当减小“横滚阻尼”,“俯仰阻尼”,每次加减1~2。
- 当手动打杆回中,飞机表现来回晃一两次,再收敛到水平姿态。可适当增加“横滚阻尼”,“俯仰阻尼”,每次加减1~2。
- 特殊需求情况联系商务和技术支持,提供飞机平台的电调型号、轴距、起飞重量、桨叶尺寸信息,我们将提供合适的参数参考回复。
3.5 电机设置
在此页面可检查飞控输出给各电调的油门信号。若适用了CAN电调,在此页面可进行CAN电调的编号配置和检查更具体的CAN电调电压、电流、转速信息。
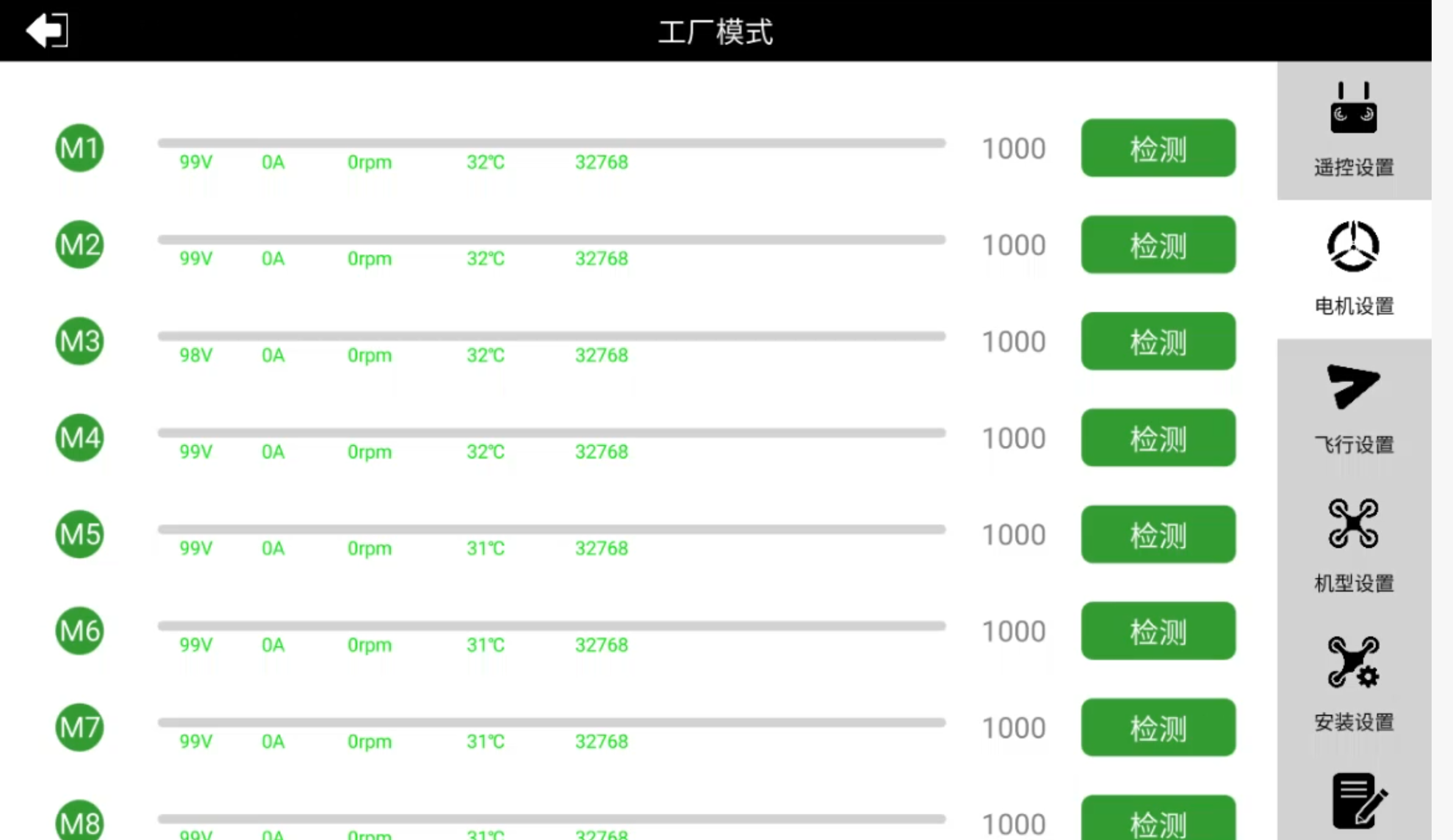
CAN电调配置: 飞控与好盈的CAN电调进行了协议适配。
- 将所有CAN电调的CAN信号,并联接入到飞控的ASPD接口;PWM信号按常机型分别接入M1~M16的PWM信号接口。
- 首次装机需要对CAN电调进行编号设置,否则大家并联在一个接口,飞控无法区分。
依次点击本页面左侧绿色M1~M16按钮对CAN电调进行设置。点击一个后,正常对应的好盈电调会发生灯语变化,稍等2秒后将在信号进度条下方显示出电调电压、电流、转速信息。
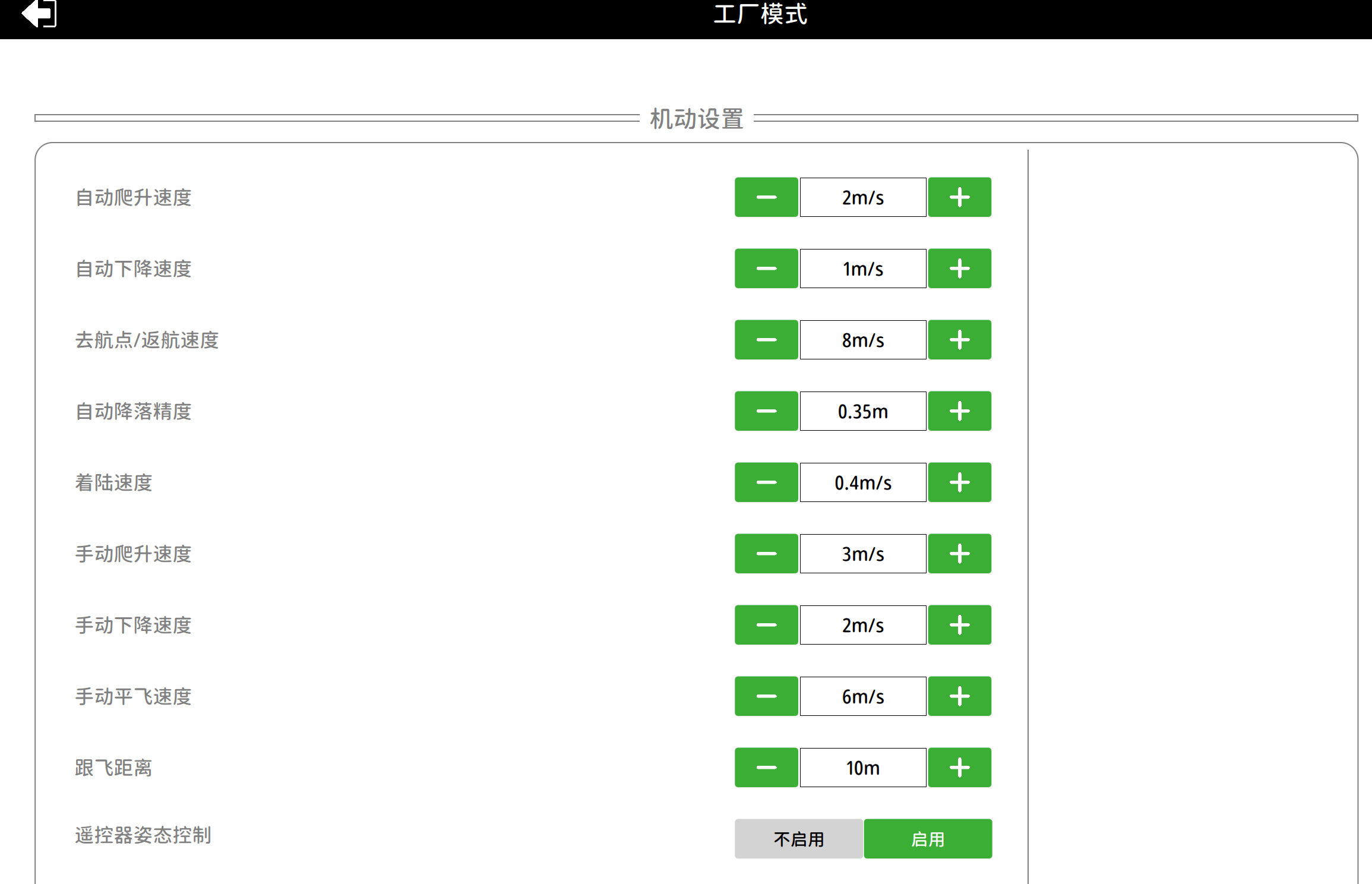
3.6 飞行设置
此页面功能为自主飞行模式,遥控器飞行模式下的爬升、下降、降落速度,可按需进行设置。
跟飞距离:无人机跟随目标物所保持的相对距离
遥控器姿态控制:启用状态下遥控器5通道会有姿态模式,如未启用状态则没有姿态模式。
卫星定位:RTK、GPS根据配置进行选择 外部定位:可接入与我们适配过的惯导系统/抗干扰模块
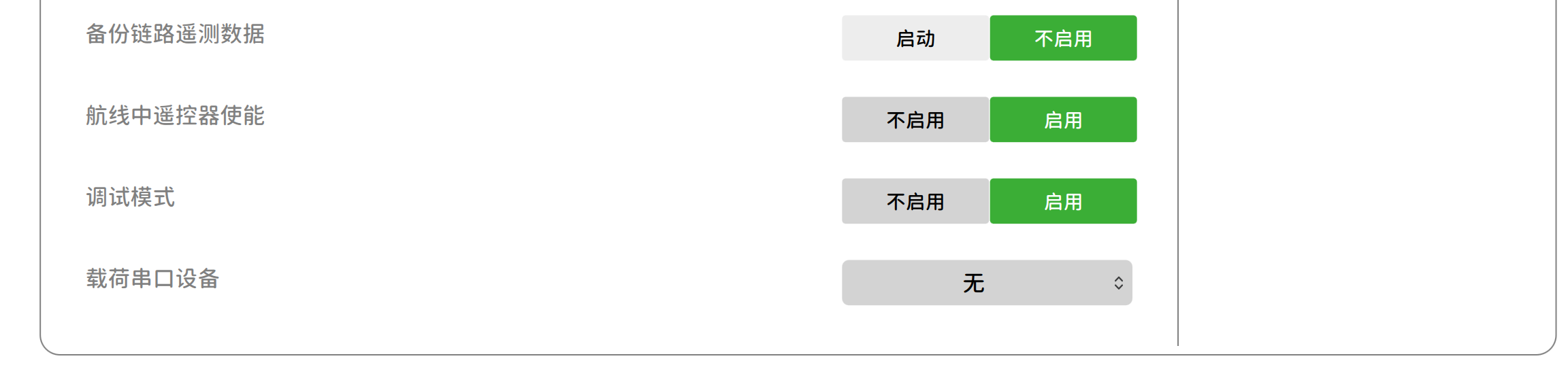
备份链路遥测数据:如接入一站多机链路时可选择不启用
航线中遥控器使能:启用后可在自主航线模式中遥控器控制飞行高度
起飞场景是动态的需要开启此模块,否则无法解锁起飞
载荷串口设备:接入飞控COM1处的光电吊舱,在此可选择对应吊舱型号,飞控可以将当前飞机姿态、坐标等信息发送给吊舱
4 设备管理
4.1 飞控
在此页面可进行飞控的固件升级、飞行日志下载。
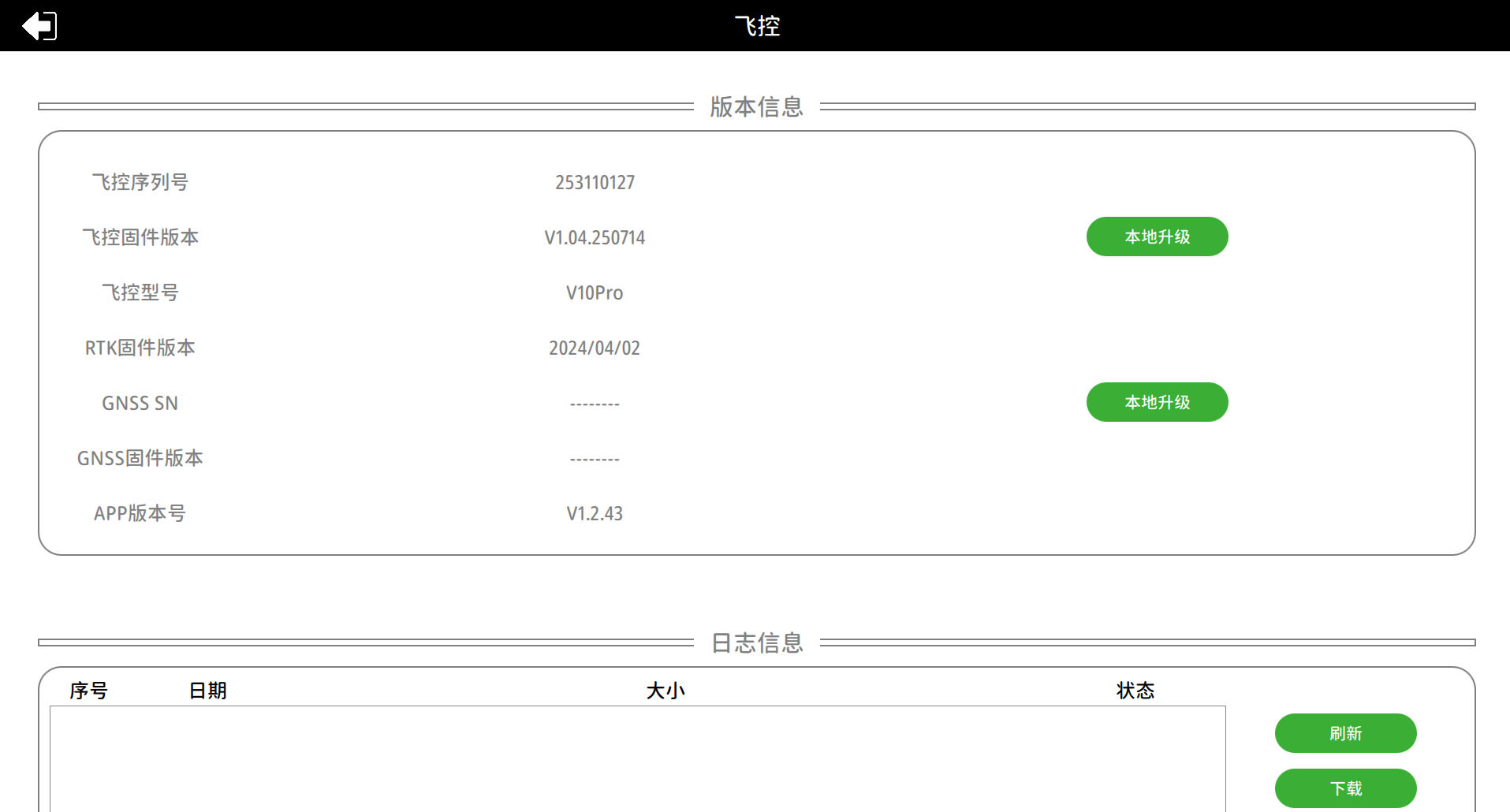
飞控升级: 可进行在线升级或本地升级。在线升级为通用固件,特殊项目定制固件请联系专项人员。 升级传出100%后将飞控重新上电,飞控需要大约10s进行内部的更新,期间电调会发出滴滴声。完成后地面站APP将可重新获得连接。 飞控日志下载: 遥控器下载日志存储路径:文件——VGCS Daily——logs,日志文件尾缀为dat的日志是地面站数据在PC端地面站软件直接回放即可,bin尾缀文件是飞控日志,需要用单独的日志回放软件进行数据分析,如有需要可联系我们。
4.2 载荷
在此页面进行抛投舵机、照明灯等PWM信号控制的载荷设备的映射和配置。
设置的各参数说明
遥控器映射通道 使用遥控器哪个通道来对该舵机\灯进行手动开关控制第一列为遥控器控制设备通道开关设置,第二列为飞控对应PWM接口接入的抛投通道。 多个舵机\灯可映射同一个遥控器通道,实现一个拨杆同时开关多个舵机。 例如下图中的设置,表示飞控对接了4个抛投舵机,它们分别接在飞控M5~M8PWM输出口。通过遥控器的7通道可同时进行接在飞控PWM输出口的M5、M6通道舵机进行控制,遥控器8、9通道可分别对接在飞控PWM7、8通道舵机进行控制

飞控映射通道 使用飞控M1~M16中哪个PWM信号接口对该舵机\灯进行开关控制。 每个舵机\灯,应映射到不同的飞控PWM信号接口。
抛投器\照明灯打开值 打开抛投舵机\灯的PWM信号。通常为1000~2000范围的值。 若需要高电平打开,则值填2500。若需要低电平,则值填0。
抛投器\照明灯关闭值 关闭抛投舵机\灯的PWM信号。通常为1000~2000范围的值。 若需要高电平关闭,则值填2500。若需要低电平,则值填0。
直通式舵机 可接入直通式舵机,根据遥控器旋钮或拨段开关行程量调节舵机角度或舵机云台
4.3 电池
在此页面可对智能电池信息进行查看。
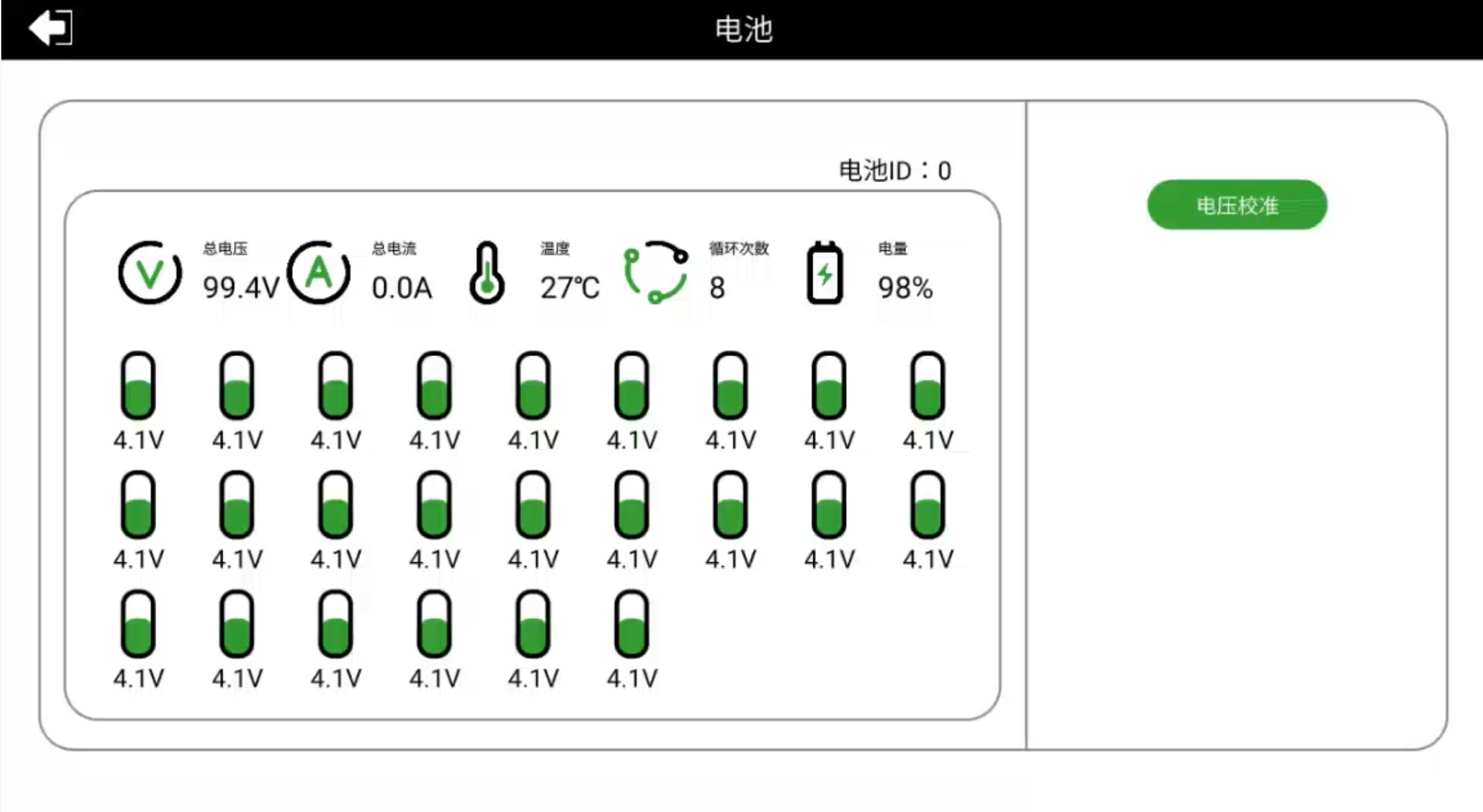
飞控与格氏、海盈、智安等电池厂家进行了智能电池CAN协议适配,与智能电池通过CAN-HUB接口进行对接,如CAN-HUB接口不够时可将配置好ID的智能电池CAN-H CAN-L 并在一起接入 支持同时接入多块电池(最多10块,智能电池厂家需按协议做好电池ID自分配)。
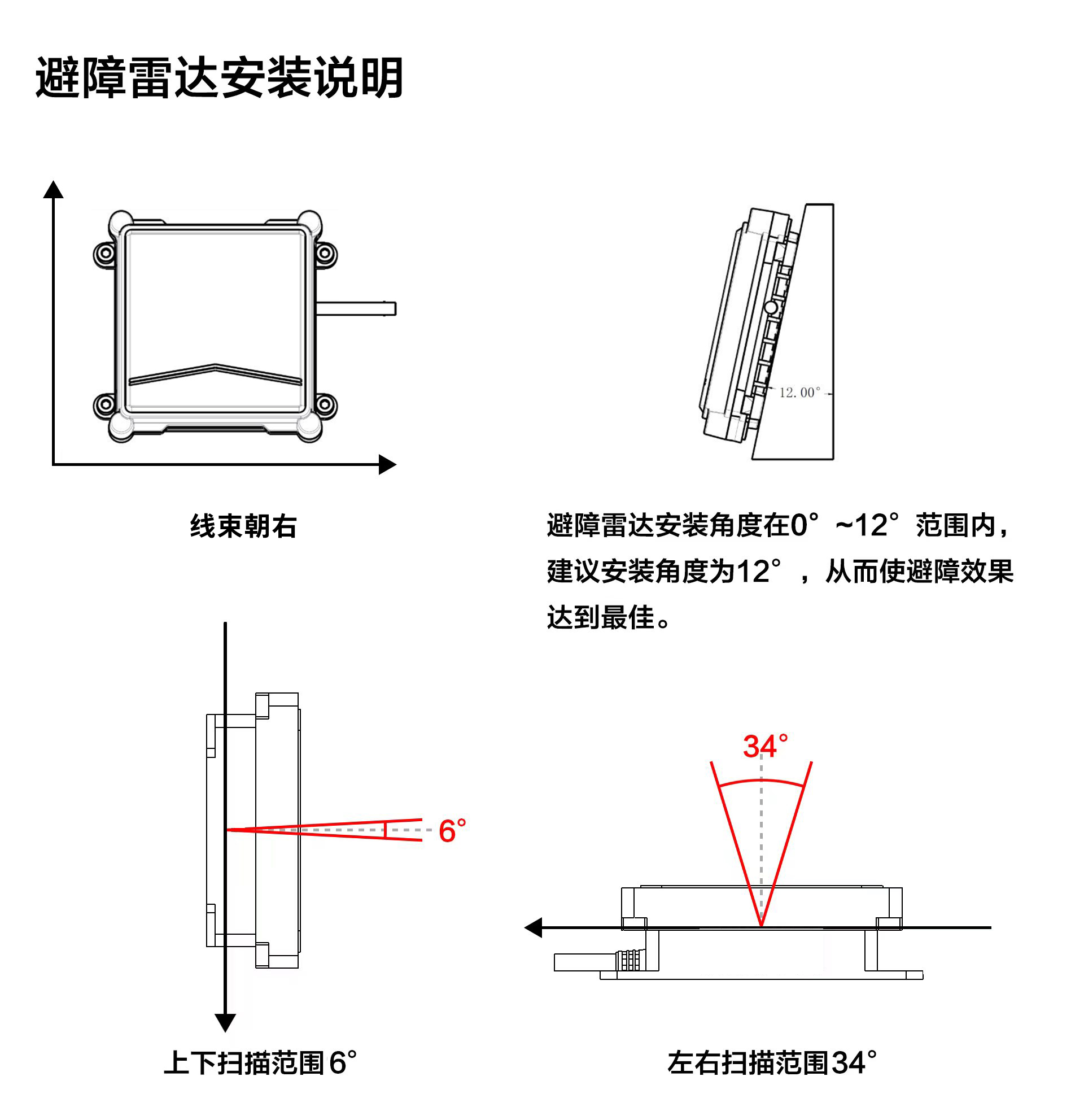
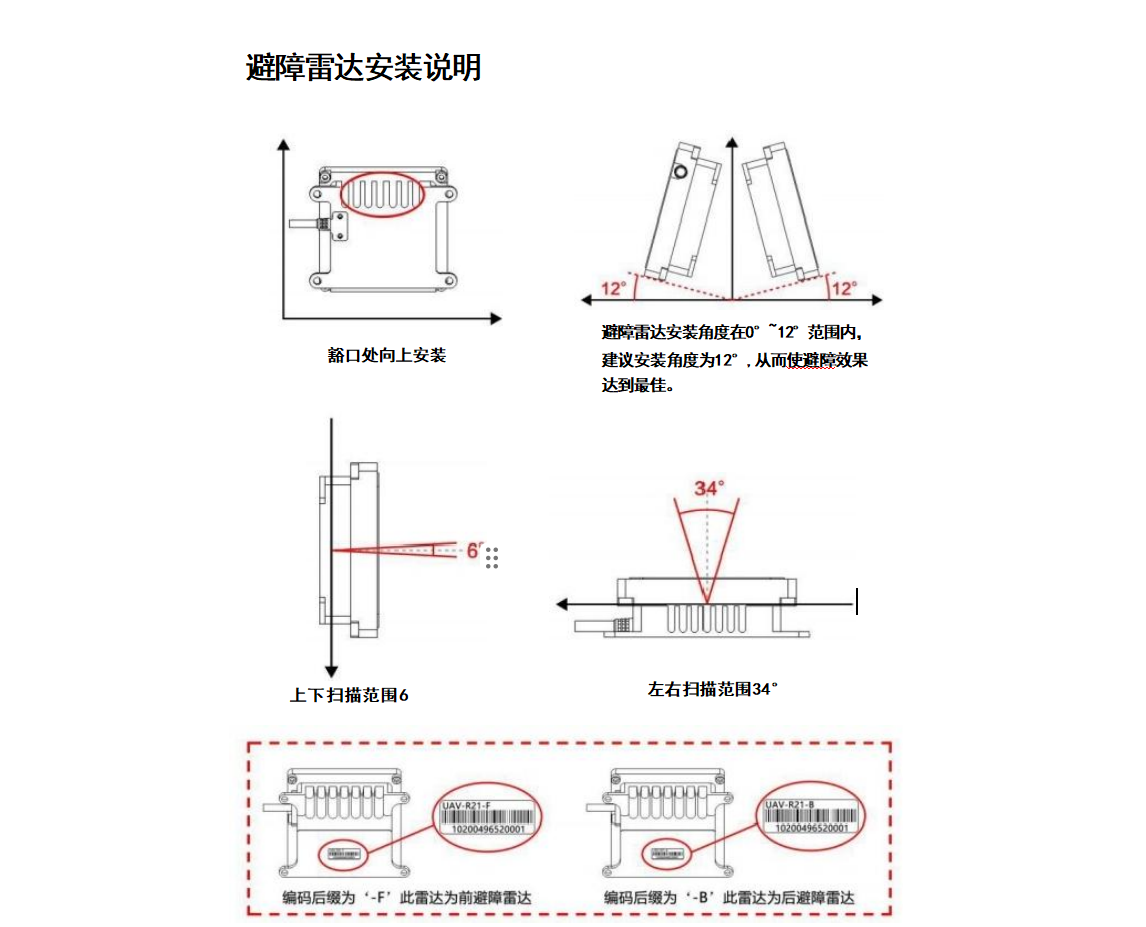
4.4 雷达
可在此页面查看各雷达数据,飞控与雷达通过CAN-HUB接口进行对接。
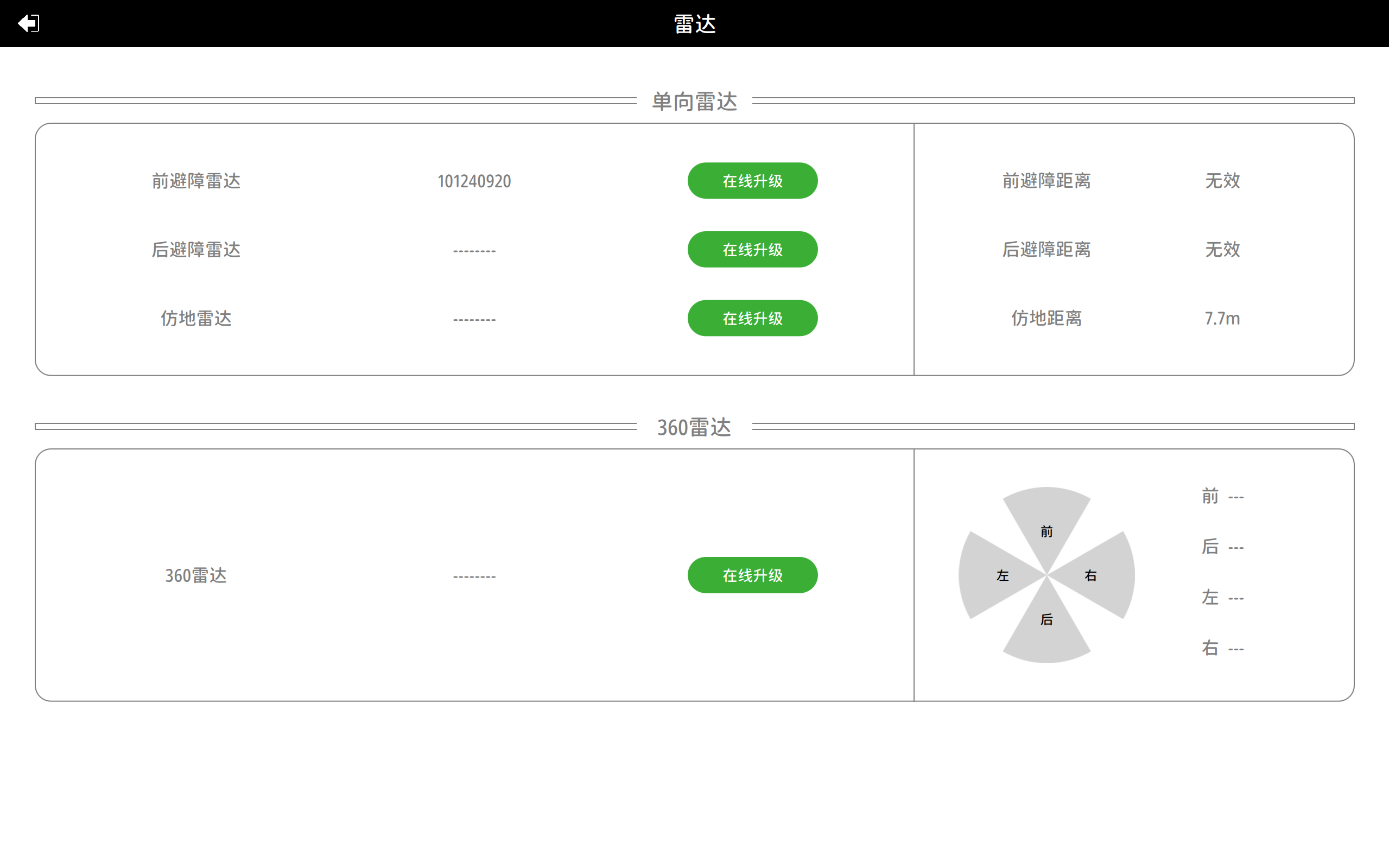 避障雷达上有字母“F”字样的为前避障,字母“B”为后避障,字母“H”对地雷达,接在CAN-HUB上时不分先后顺序
避障雷达上有字母“F”字样的为前避障,字母“B”为后避障,字母“H”对地雷达,接在CAN-HUB上时不分先后顺序
4.5 吊舱
在此页面选定吊舱的型号。APP将根据吊舱型号自动匹配视频流的网络配置。
若使用的吊舱型号不在列表中,选择“其它型号”,并根据吊舱说明书中的视频流地址进行填入。

5 手动飞行
飞控可通过支持SBUS的遥控器进行手动飞行,手动飞行有姿态模式和定点模式两种。
- 姿态模式:摇杆对应飞机目标飞行姿态。摇杆回中时保持飞机姿态水平,油门定高,位置不锁定。当有外界扰动如风吹时会有位置漂移。
- 定点模式:摇杆对应飞机目标飞行速度。摇杆回中时保持飞机定点,油门定高。
快速开始手动飞行的步骤:
飞前检查 确认APP无异常警报,定位良好。飞机电池、电机动力正常。
手动解锁 通过遥控器5通道拨杆,将飞控切换至姿态模式或定点模式。外八或内八摇杆进行解锁。注意手动飞行前需将遥控器进行校准,飞控才能正确识别摇杆行程。 解锁后飞控将输出怠速油门,若解锁后持续保持无推油门杆动作,5秒后将自动上锁。
手动起飞 解锁后将油门杆推过中位,飞控加油进行起飞。 注意油门过中,不要再在飞机未离地的情况下大幅度打横滚俯仰杆,可能会导致飞机在地面侧翻。
手动降落 拉低油门控制飞机降落,待飞机接触地面后,将油门拉到最低,保持一段时间,飞控会自动检测上锁停转。注:飞行时油门在最低位,横滚、俯仰、航向摇杆不可控,主要是为了防止空中误操作进行强制上锁。
手动强制上锁 飞行中遇到一些异常情况,可能需要手动上锁。切到姿态模式或在定点模式,内八或外八动作均可进行强制上锁应急。 注意正常飞行时,特别是进行机动测试时,不要打杆出内八或外八的手势。
6 飞行界面介绍
1.返回(返回至主界面)
2.飞行模式(姿态——GPS——自动悬停)
3.视频窗口
4.电池电压
5.卫星定位(起飞前将其点开并查看ANT1与ANT2天线收星状态)
6.遥控器通讯(遥控器链路通讯状态显示)
7.飞行时间
8.任务模式
9.航线中变更飞行速度
10.恢复航线高度(使用遥控器在航线中变更飞行高度后使用此功能可恢复至航线预设高度)
11.清除航迹
12.居中锁定(飞机居中锁定)
13.定位遥控器
14.舵机控制(外接舵机控制)
15.虚拟摇杆(可进行飞机降落时位置调整)
16.设置菜单栏

7 物流作业
在右侧边栏选择“通用设置”->“应用模式”为“物流”。在右上角选择作业场景“手动物流”、“AB物流”或“多点物流”。

7.1 手动物流

飞行操作参考手动飞行。在飞行页面可打开舵机控制面板,选取需要控制的舵机进行开关。舵机开关即可通过APP进行操作,也可通过映射的遥控器通道进行操作。
通过APP舵机状态面板进行抛投舵机操作时,数字图标点击绿色,代表此次开关将操作该舵机。可同时选取一个或几个舵机进行开关操作。如下图中表示选中了1、2两个舵机,当点击“打开“或”关闭”按钮时,这两个舵机将都被打开或关闭。
手动物流在飞行时APP端可以直接进行飞机的返航或者原地降落功能,如需异地降落功能需配置对地雷达
当被选中的舵机已经处于打开\关闭状态时,对其进行打开\关闭操作将不会改变其当前状态。

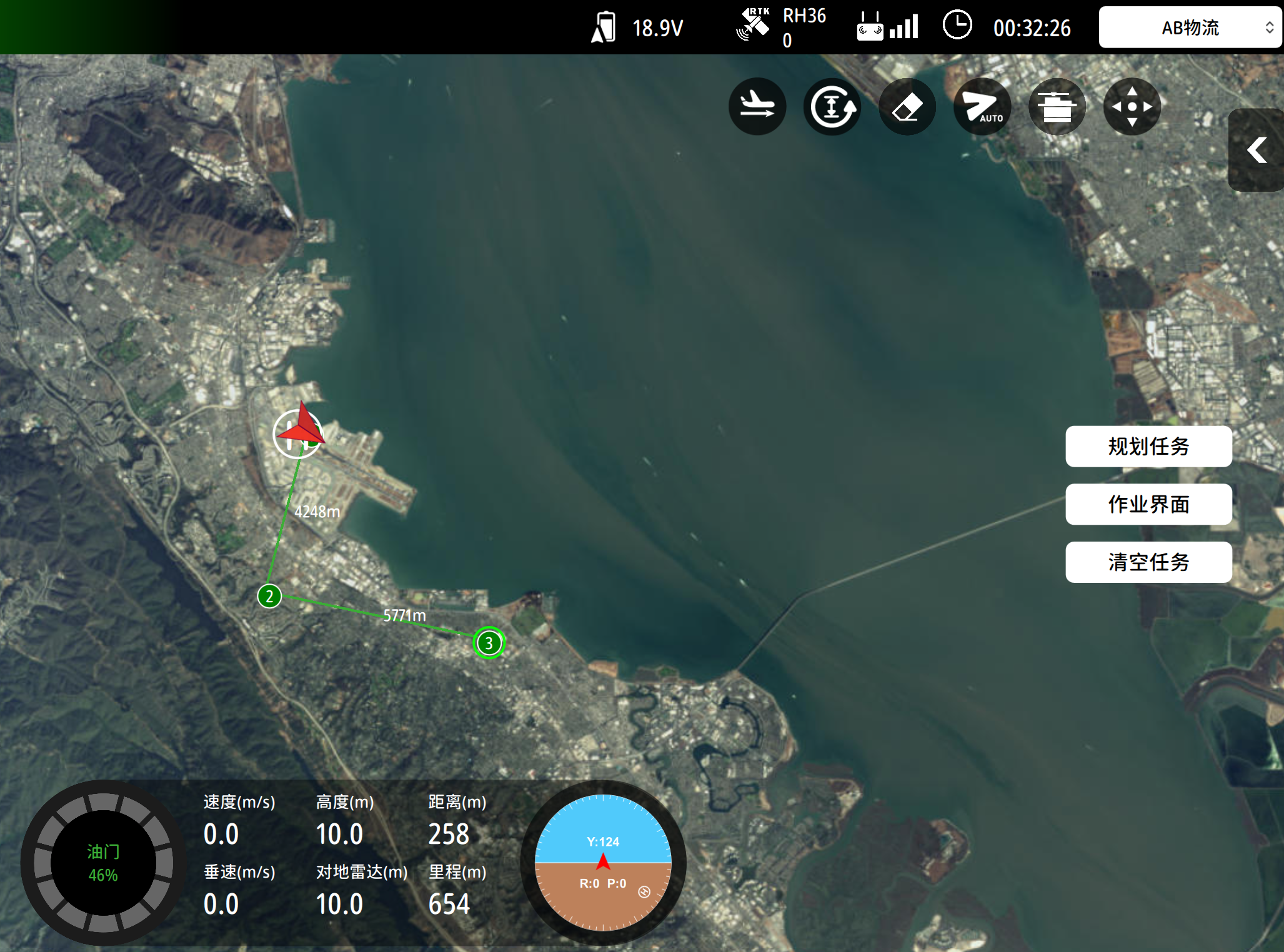
7.2 AB物流
AB物流适用于两点间单次运输的情况。可执行A->B的货物投运,B->A的逆序返回。
AB物流的通常适用流程:
任务规划
点击右侧任务规划按钮,APP将飞机当前位置作为A点,人工在地图上选取B点。若AB间非简单直线,比如添加避让点,可点击“+”号增加中间航点,如已有A\B点坐标信息,即可手动输入A\B两点坐标信息。
打开左边AB任务编辑面板,可编辑具体的任务属性。高度为AB航线的飞行高度,“速度”为AB航线的飞行水平速度。若已有确定的A\B点位置,A\B的精确经纬度可进行人工编辑如图4~图7处。
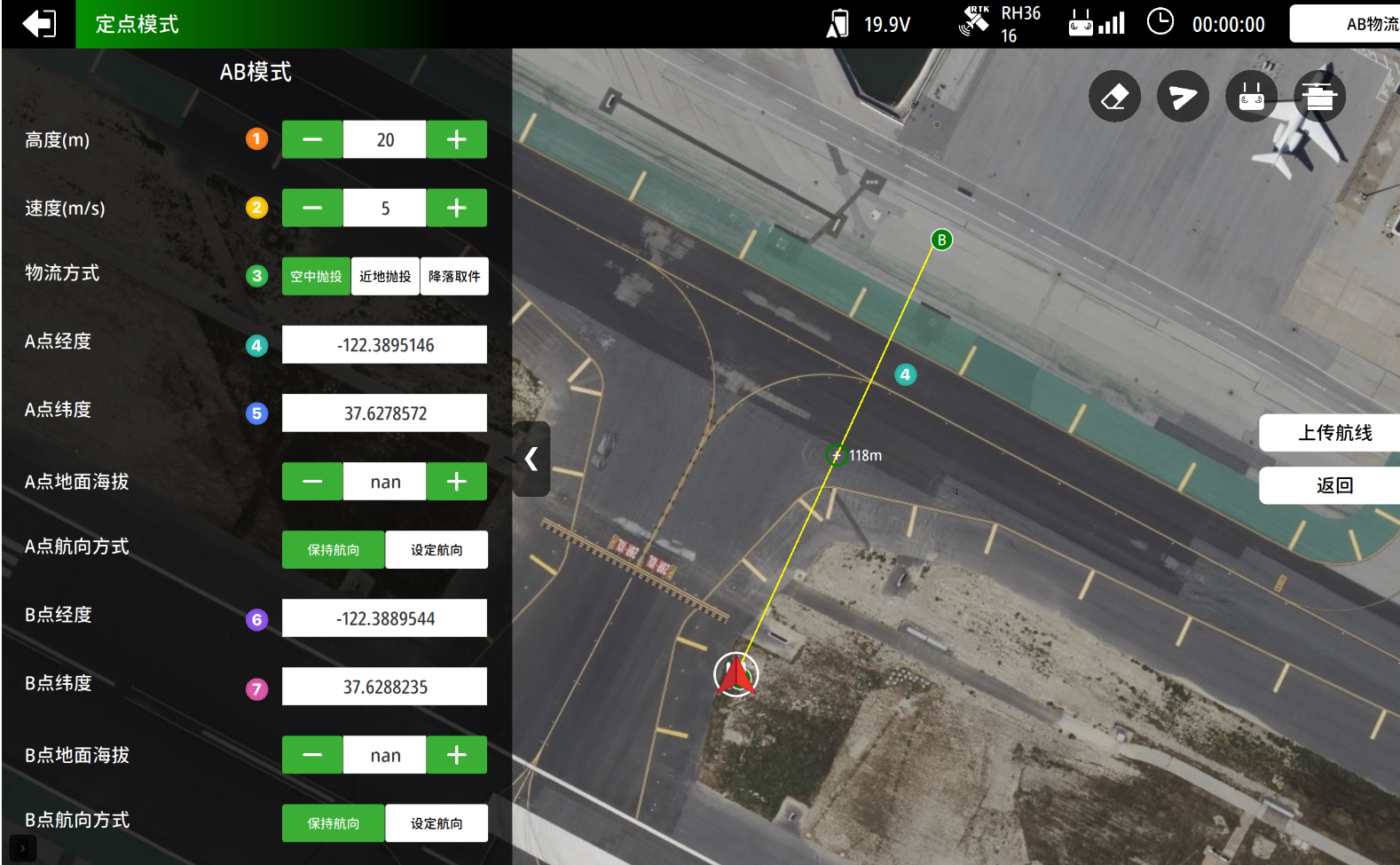
- 物流方式“空中抛投”:飞机A点去往B点的飞行方式根据设置航点高度不同,飞机是边爬升或边下降边飞往B点,飞机到达B点后按设定飞行高度打开抛投舵机。然后飞机沿航线设定高度进行逆序返回A点并在A点降落。
- 物流方式“近地抛投” 需装配对地雷达,A点去往B点飞行方式为到达航点后进行爬升/下降至相对高度,到达B点后,自动爬升或降低高度。当对地雷达测得距离到达“近地抛投高度”,飞控将打开抛投舵机。然后飞机爬高到航线高度,沿航线逆向返回A降落。注意:必须配备对地雷达以实现此功能。

物流方式“降落取件”。飞机在B点进行降落,落地后人工取走机上货物。
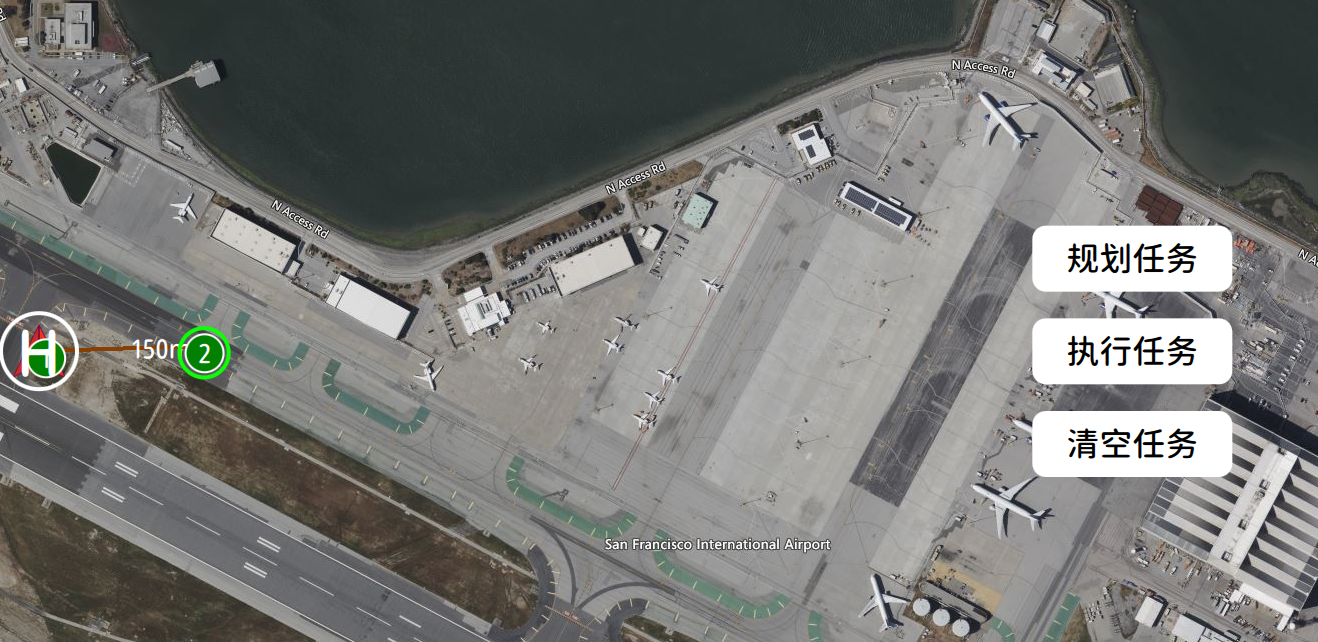
规划好任务后,点击右侧“上传航线”将任务航线上传给飞控。
任务作业
做好飞前检查工作,包括动力、电机、APP无异常和报警,点击右侧“执行任务”;
点击“解锁起飞”,飞机收到指令后解锁怠速旋转3s,然后加油门垂起起飞到预设的起飞高度;
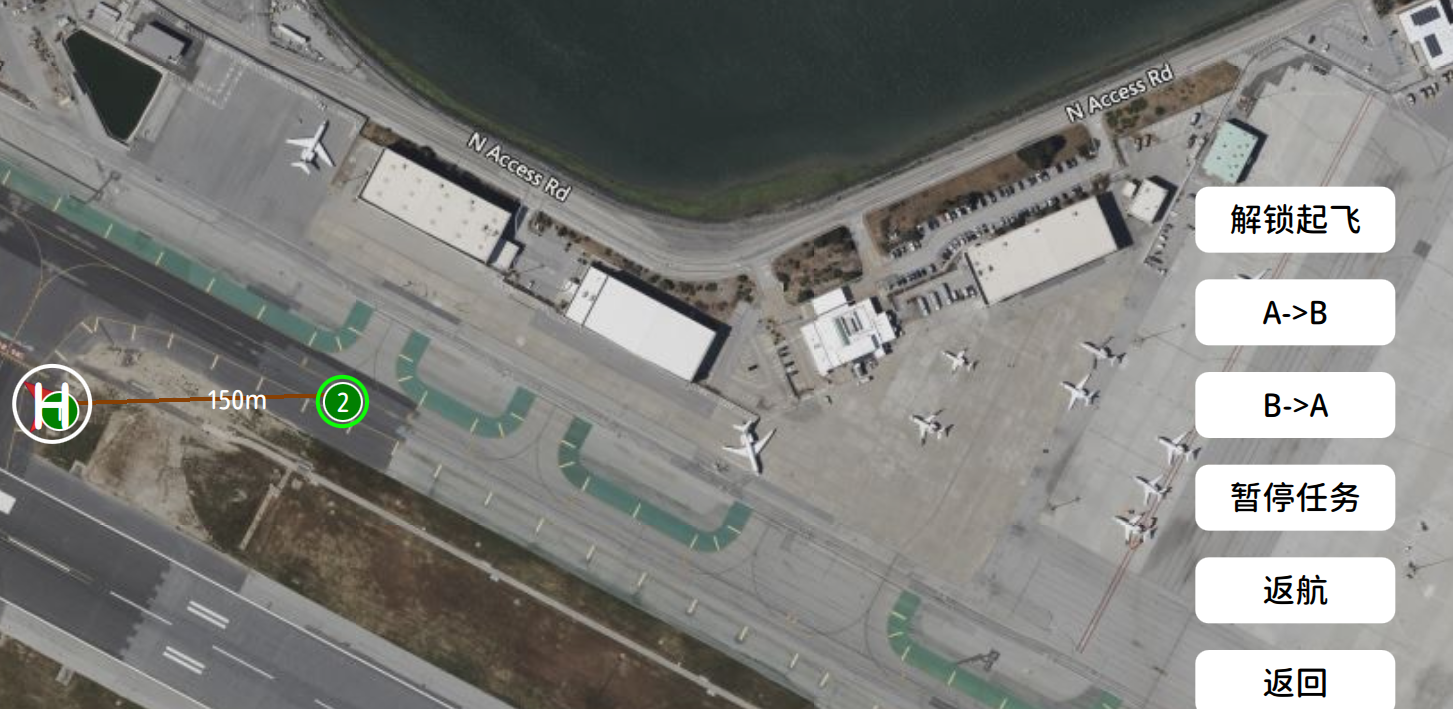
点击“A->B”, 飞机将从第一个航点A开始,沿航线顺序飞行到最后一个B航点;
到达最后一个航点,飞控按任务规划中预设的“物流方式”,进行抛投、或沿航线逆序返回A,或在B降落;
如果飞机在B起飞,需要飞回A。在“解锁起飞后”,点击“B->A”。飞控将从B点开始,逆序按航线飞回A,并在A降落。
作业中可点击“暂停任务”,飞控中止航线进行悬停。点“继续任务”飞控将继续飞往之前的目标航点。
“A-B”任务固定包含了B->A的返回流程。若任务中想返回而不继续航线,点击“返航”可返回起飞点。
7.3 多点物流
多点物流可实现沿途多个抛投点的抛投,适用于一次挂载飞行、多处抛投的作业情况。

任务规划 在地图上选取好航点后,打开左边栏可对具体的航点属性进行编辑。 “参数设置”会对所有航点的相应属性进行更改,在需要统一的变更比如高度、速度时先在此子窗口进行修改。
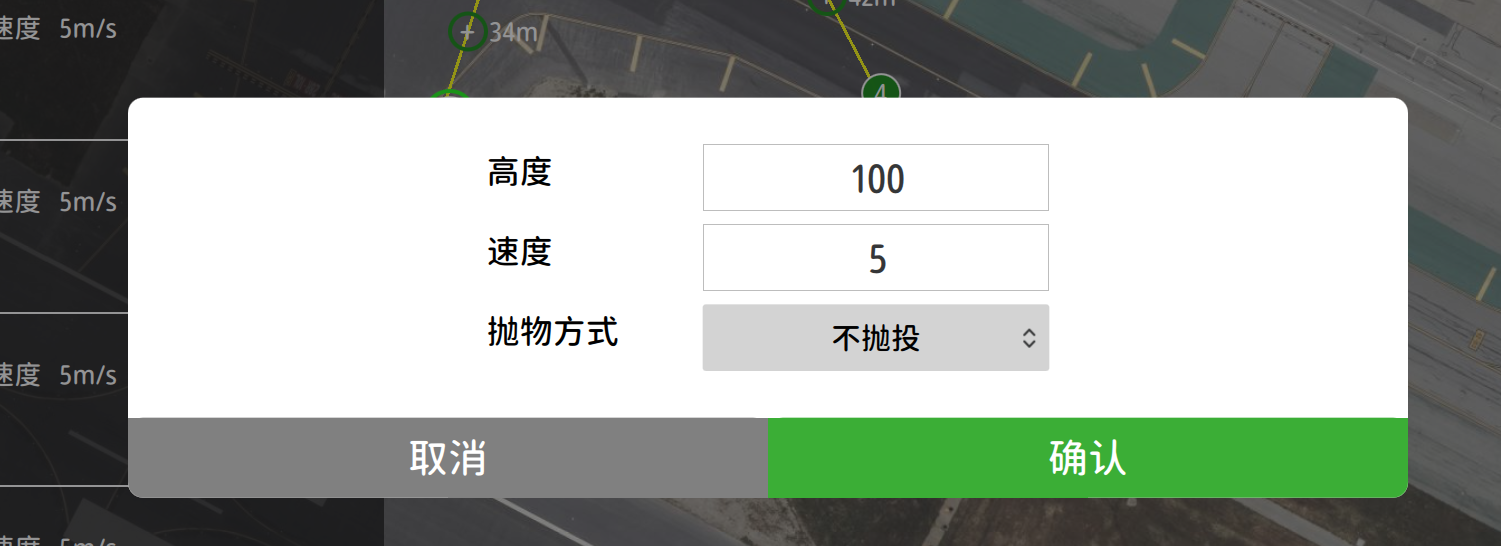 “单个编辑”可对每个航点的具体属性 进行修改。
“单个编辑”可对每个航点的具体属性 进行修改。
 上图中,除经纬度外,其它几项属性的释意如下:
上图中,除经纬度外,其它几项属性的释意如下:- 高度:此航点的相对高度m(相对起飞点)。当航点高度不一致时,飞控将按航点连线斜坡进行飞行。若设置的“速度”与航线斜坡坡度有冲突(例如坡度很大,垂直速度有限,水平速度无法达到预设),飞控会自动减少速度的大小,优先满足航线坡度的跟踪。
- 速度:飞往此航点的水平速度m/s。
- 抛投方式:空中抛投-在航点原高度抛投;近地抛投-在航点依据下雷达降低高度,当雷达距离到达抛投对地高度后进行抛投,然后爬升回到航点高度并继续后面的航点。
- 抛投通道:在该航点具体打开哪几个舵机。可单选一个,也可多选多个舵机。到达航点后执行抛投时,选中的舵机将被打开。
编辑好航线后,点击“上传航线”将规划好的任务航线发送到飞控。点击“返回”->”执行任务“进入作业。
任务作业

- 做好飞前检查工作,包括动力、电机、APP无异常和报警,点击右侧“执行任务”;
- 点击“解锁起飞”,飞机收到指令后解锁怠速旋转3s,然后加油门垂起起飞到预设的起飞高度;
- 点击“开始任务”,飞机将沿规划的航线进行飞行。航点中有抛物的航点,飞控将在该点进行对应的抛投舵机动作。
- 航线中途可点击“暂停任务“,飞控将悬停。点击继续任务,飞控将飞往之前的目标航点。

- 在航点数字图标上点击,可弹窗执行飞往该目标点。

- 飞行完最后一点后,飞控将进行悬停。飞行中随时可按需要点击“返航“,飞控返回起飞点降落。
- 做好飞前检查工作,包括动力、电机、APP无异常和报警,点击右侧“执行任务”;
8 巡查作业
在飞行页面右边栏,选择“设置“->”应用模式”为“巡查”。
 右上角可选择“手动巡查”、“指点巡查”、“航线巡查”。
右上角可选择“手动巡查”、“指点巡查”、“航线巡查”。

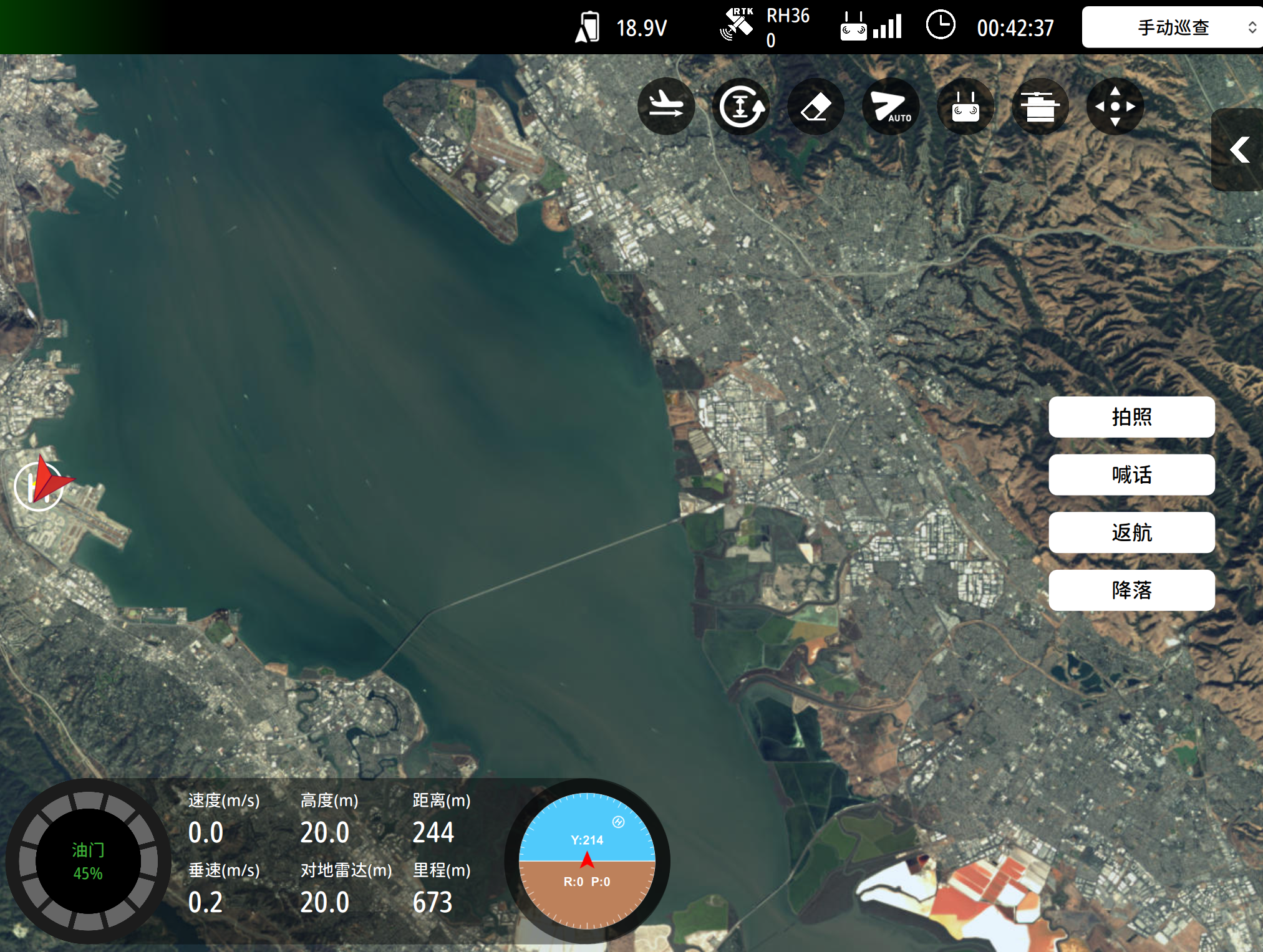
8.1 手动巡查
手动巡查主要由操作人员控制飞机飞行和遥控器操作吊舱。具体飞行操作可参考手动飞行章节。
飞行中可点击右侧
8.2 指点巡查
指点巡查适用于在地图上选取目标位置点,快速方便的控制飞机转向指向该位置点或飞到该位置点。
飞到目标点

- 在地图上选取目标位置点。
- 在左边栏编辑具体的目标位置点信息。
- 点击“飞向该点”,则飞控执行飞到该目标点。该指令在飞机起飞后可执行,若未起飞,先“解锁起飞“或手动遥控器将飞机起飞。
- 到点航向表示飞机到达目标点后机头指向。“默认航向“表示保持到点时的当前机头指向,若适用场景需要到点后转头指向某方位(比如指向正东),选择”指定航向“(比如90度)。
- 到达该点后,若要在该点降落,点击“降落“。注意:若要进行异地降落,飞控需配备下向雷达,用于探测对地高度,实现近地阶段自动提前缓降。若无对地雷达,异地降落时将按最小下降速度执行。
看向目标点
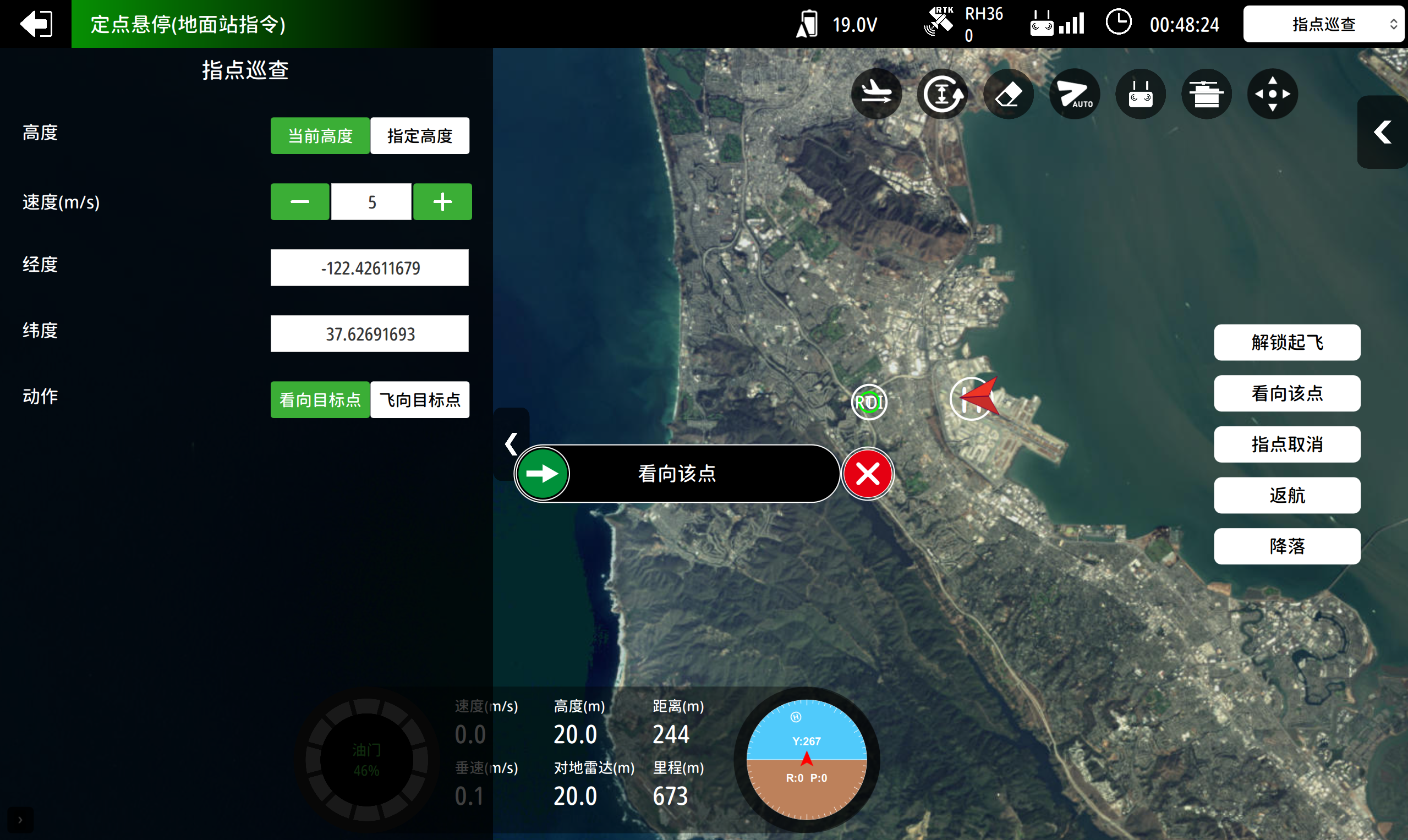
- 在地图上选取目标位置点。
- 在左边栏编辑具体的目标位置点信息。
- 点击“看向该点“,则飞机保持机头转向指向该目标点。后续若切换到航线再自动飞行,也仍然保持机头始终指向该目标点。返航将自动取消对该目标点的机头锁定,”指点取消“将人工取消对该目标点的机头锁定。
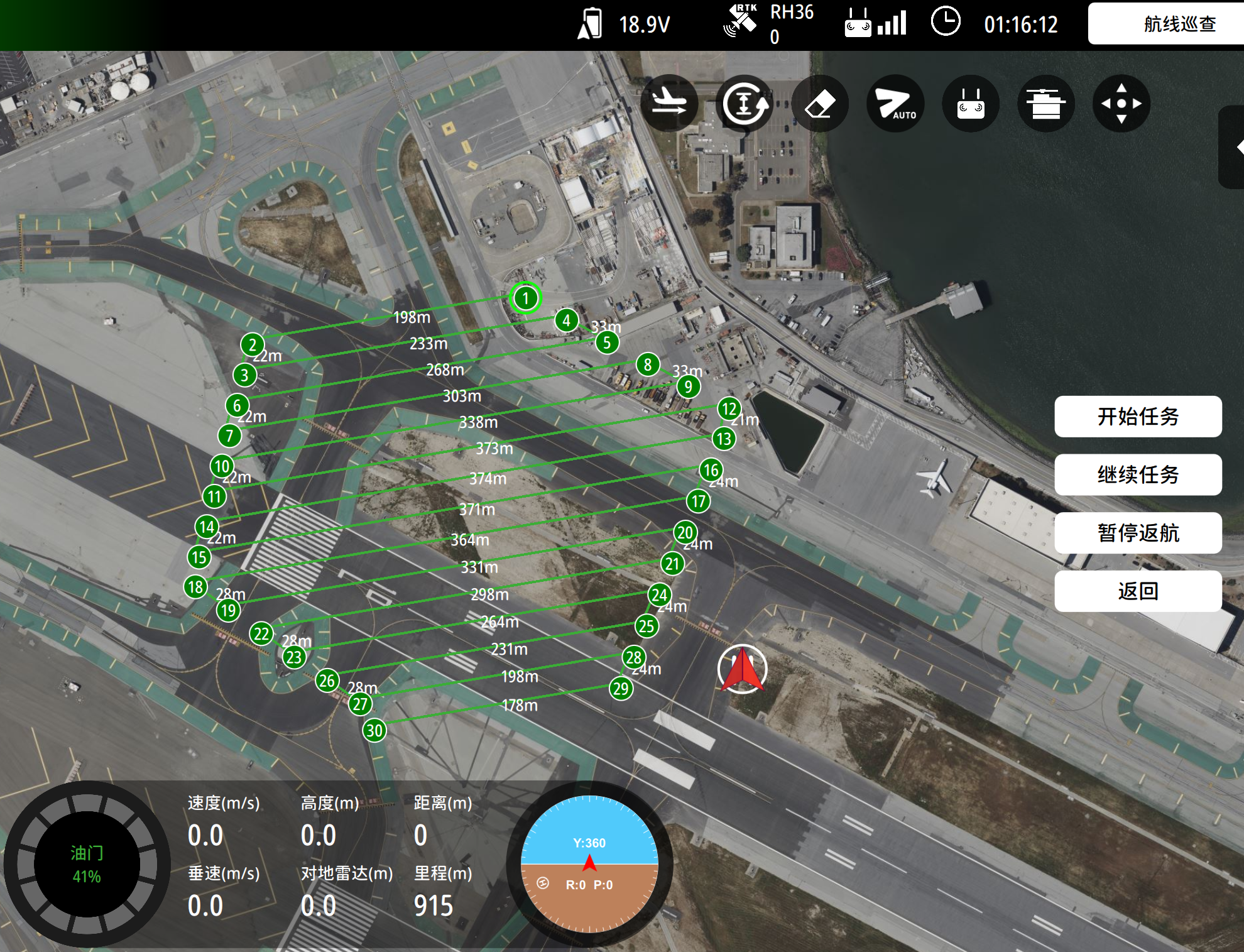
8.3 航线巡查
航线巡查用于对指定区域,按照规划好的航线进行飞行和巡查任务。
任务规划

- 单条航线
从地面站自由选取航点,参数进行设置。可设置航线中的定时定距拍照。
 航线中拍照POS将实时传输显示在APP上,可通过APP导出POS记录。
航线中拍照POS将实时传输显示在APP上,可通过APP导出POS记录。

- 带状航线
带状航线适用于对带状条形区域进行来回巡查的场景,例如管线、公路等。
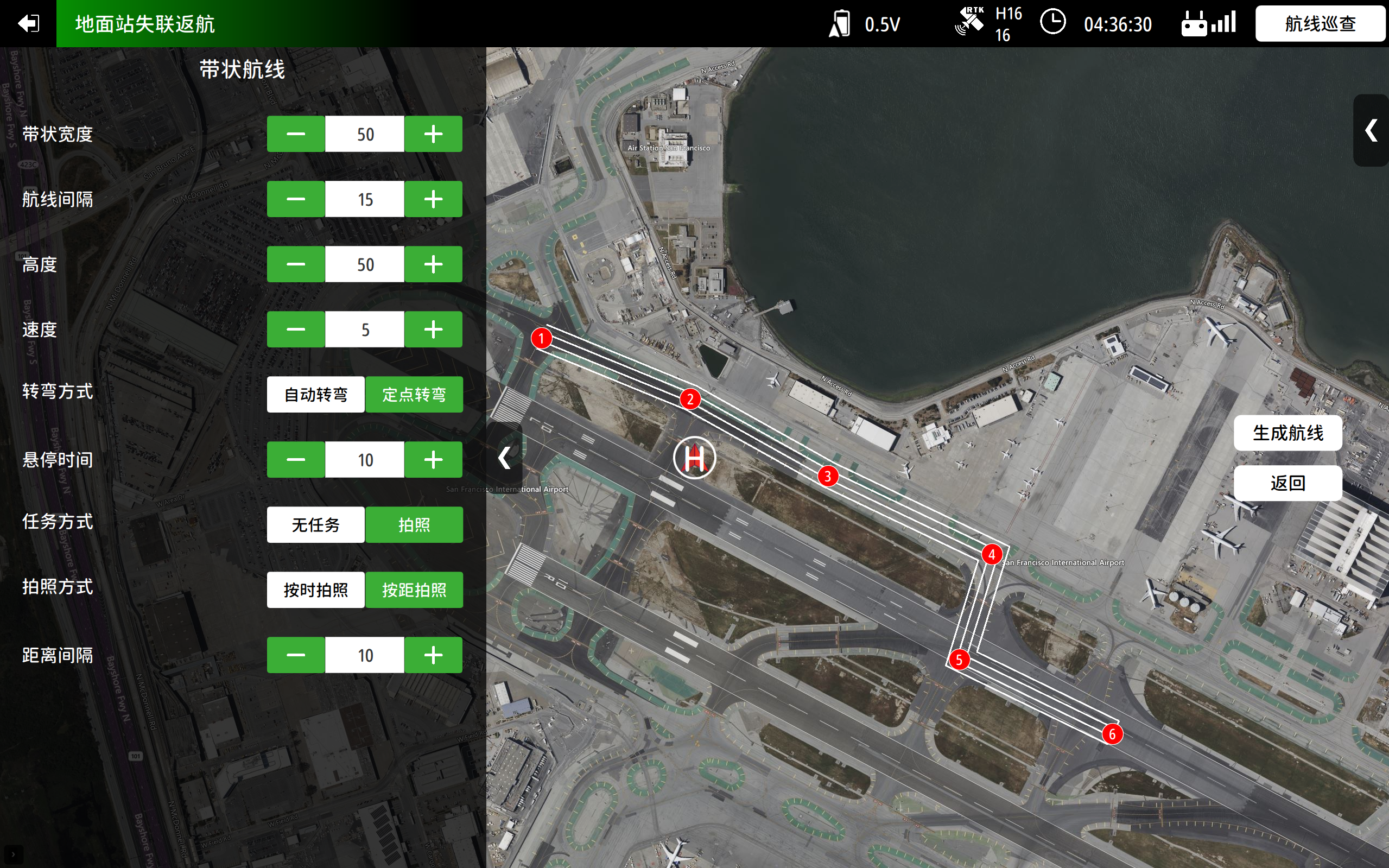 在地图上选取带状航线走向中心点,APP将自动按左边栏的带状航线参数生成对应航点。
在地图上选取带状航线走向中心点,APP将自动按左边栏的带状航线参数生成对应航点。
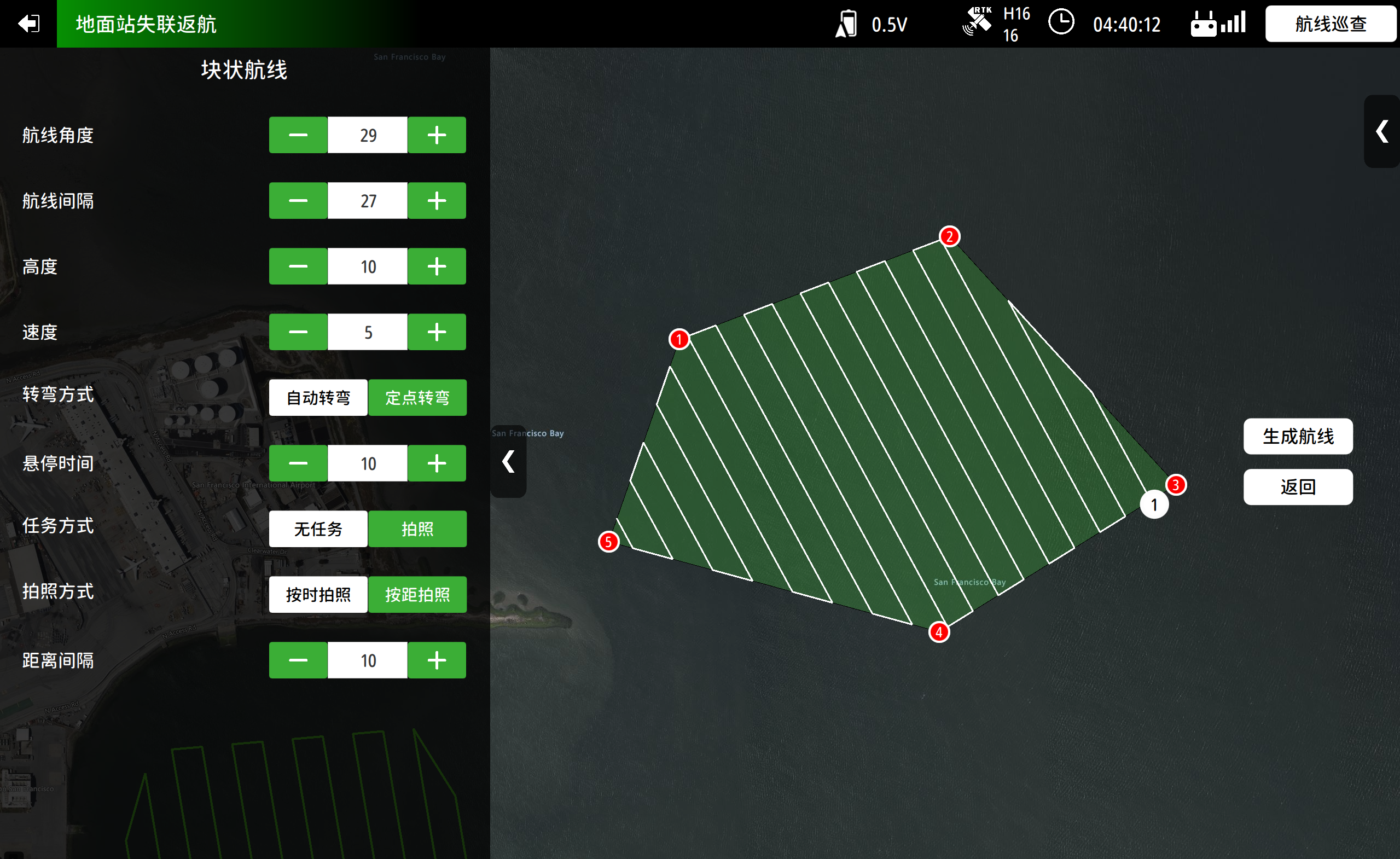
- 区域航线 区块航线用于对指定闭合区域进行内部覆盖巡查的场景。 在地图上选取区块的边界顶点,APP将按照左边栏块状航线参数自动生成航点。
规划完航线后,点击“上传航线“将航点上传给飞控。
- 单条航线
从地面站自由选取航点,参数进行设置。可设置航线中的定时定距拍照。
任务执行
 - 做好飞行前检查,确认APP无异常警报,定位良好。飞机电池、电机动力正常。
- 做好飞行前检查,确认APP无异常警报,定位良好。飞机电池、电机动力正常。- 点击“解锁起飞”,飞机自动起飞到预设的起飞高度;
- 点击“开始任务”,飞机按规划的航线执行任务;
- 点击“暂停任务”,飞机将悬停;
- 点击“继续任务”,飞机将继续飞往之前的目标航点;
- 点击“返航”,飞机将返回起飞点;
- 在航点数字图标上点击,可弹窗执行飞往该点;
- 任务中若想重新规划和上传航线,可回到规划页面重新规划和上传。飞控将在执行完当前 目标航线后的下个航点,按新传输的航线飞行。若想立刻按新的航线执行,可直接点新的目标航点执行飞往该点。
9 一站多机和编队飞行
APP支持同时连接和操控多个无人机, 具有“一站多机”的能力。并且APP可以将1号无人机的状态数据转发同步给其它无人机,实现简单的无人机编队飞行。 通常我们需要具备一对多的链路,或多个一对一的链路,在PC上进行多机相关的操作。常见的图数一体集成式遥控器如 MK32、MK15、H30、H20、H16等均只有一对一的遥控链路,无法实现一对多的操作。
9.1 多机相关设置
在“飞行页面”打开右边栏,选择“应用模式”为“集群”。
 多机情景下,APP通过不同的飞机编号对无人机进行区分。因此首次使用前需要将各无人机进行不同的编号设置。无人机的编号可从 1到255。如果要进行编队飞行,1号ID无人机将作为队形主机,其它编号无人机做为队形从机。
多机情景下,APP通过不同的飞机编号对无人机进行区分。因此首次使用前需要将各无人机进行不同的编号设置。无人机的编号可从 1到255。如果要进行编队飞行,1号ID无人机将作为队形主机,其它编号无人机做为队形从机。
首次设置无人机编号的步骤:
- 将飞机单独上电并与APP连接;
- 在“飞行页面”右边栏,设置此无人机的“飞行器编号”;
- 将飞机下电 对所有飞机按上述步骤分别设置不同的“飞行器编号”

9.2 多机飞行操作
多机时APP将同时显示多个飞机的图标和状态。可对单个选中的飞机进行指令操作,也可对全部飞机进行指令操作。可单独对每个飞机规划自己的航线。
左上角为飞机选择区,点选不同的飞机,然后可对其进行指令操作。
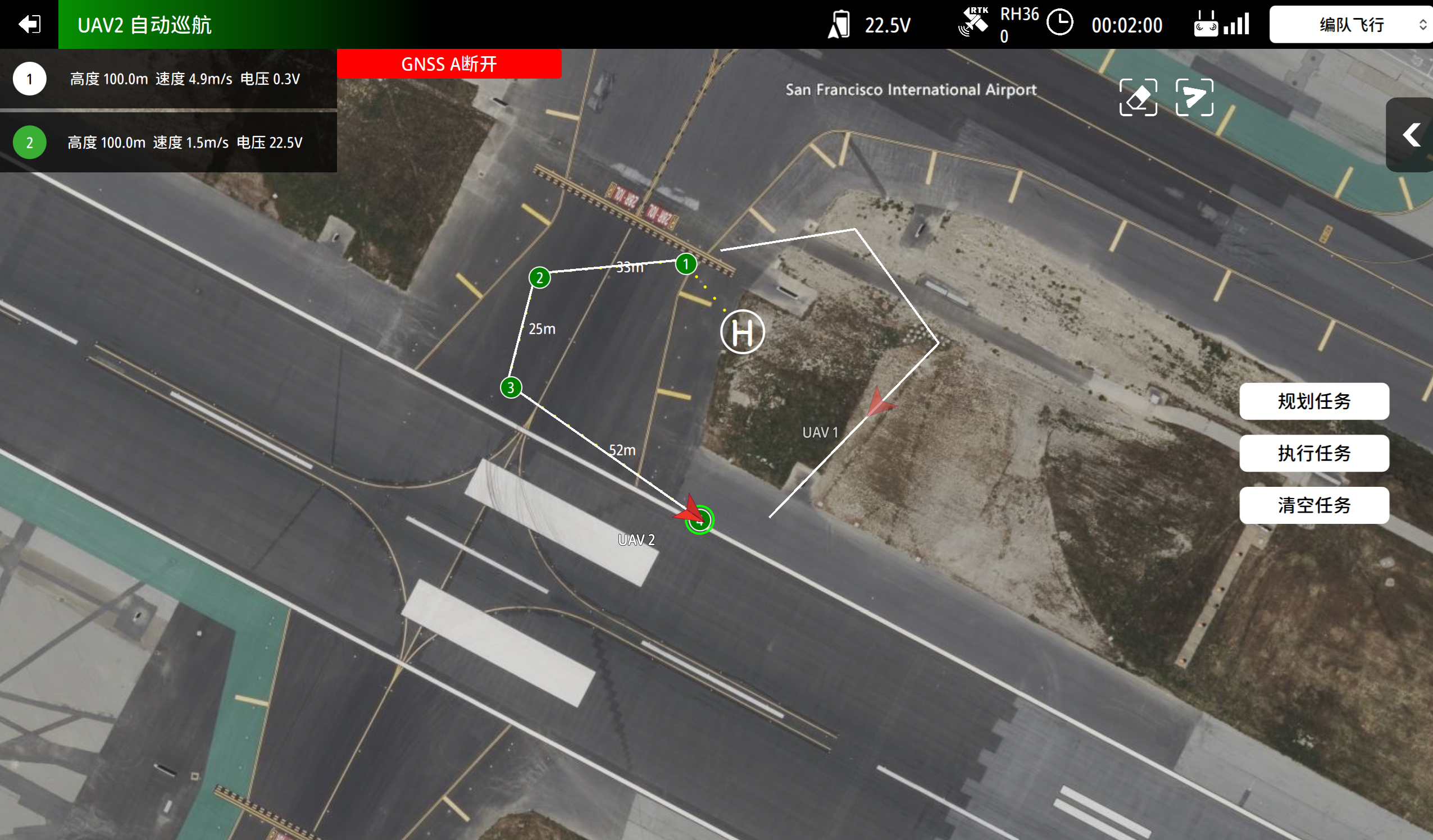
9.3 编队飞行操作
编队飞行时,1号飞机作为队形主机,其它飞机根据自己的编号,计算并控制保持自己在设置的队形中对应位置,达到保持队形的效果。

编队飞行一般如下操作
- 打开“飞行页面”左边栏,选择需要的队形、间距等参数,点“设置”将信息发送给无人机;
- 将各飞机起飞后,左上角选择飞机,点击“集结”按钮,对应飞机将加入编队队形,飞向编号对应的位置;
- 左上角选择飞机,点击“解散”按钮,对应飞机将离开编队队形,进行悬停;
- 操作1号飞机进行航线或其它动作,所有在队飞机将与1号飞机保持队形随动。
注意事项: - 建议配备基站或4G网络RTK机载模块,实现飞机的高精度定位。机间距离通常不小于15米(根据飞机本身尺寸而定);
- 飞机集结进入编队时注意飞机到达队形位置经过的直线路径,不要与其它飞机相撞。
- 如有其它疑问请关注微克智飞微信公众视频号或官网查询相关操作视频
9.4 多机联吊操作
1.点击编队飞行并选择多机联吊
2.点击作业界面
 3.根据需求进行多机联吊方式选择
4.多机联吊时主机飞行器编号必须设置为1,从机为2~3依次类推更改飞行器编号后需重启飞控
5.飞机起飞前必须按照图示进行主机与从机位置摆放,不可随意摆放,否则空中从机集结时易发生碰撞
3.根据需求进行多机联吊方式选择
4.多机联吊时主机飞行器编号必须设置为1,从机为2~3依次类推更改飞行器编号后需重启飞控
5.飞机起飞前必须按照图示进行主机与从机位置摆放,不可随意摆放,否则空中从机集结时易发生碰撞

6.以双机联吊为例
7.按下列步骤进行操作设置,机间间距不建议低于15米
8.队形旋转:在一些特殊情况下需要进行主从机位置调换,可选择旋转,旋转模式:遥控器操控主机在当前位置进行旋转,从机会以主机当前位置为圆心,跟随主机旋转一圈。不旋转:从机在当前位置原地跟随主机旋转。
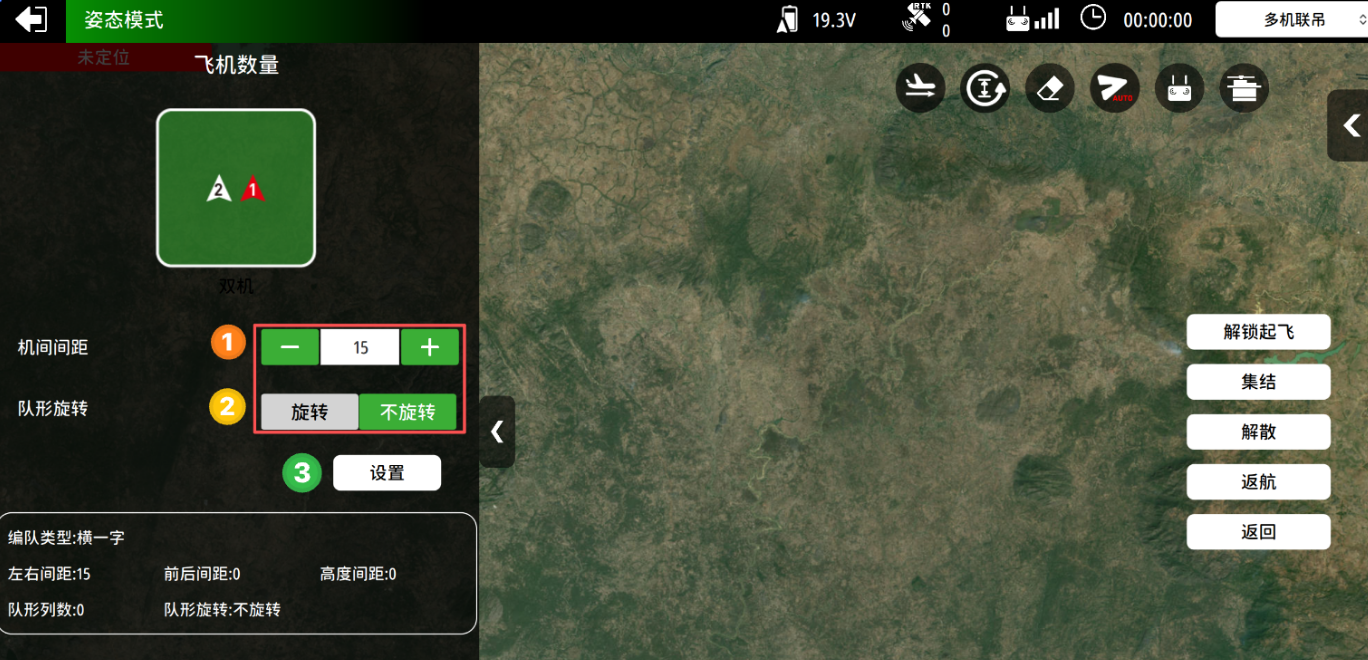 9.点击设置后从机遥控器上的飞机图标会变为蓝色将地图放大会看到灰色阴影的飞机图标,此图标为从机集结后要到达的目标位置,同时从机遥控器能看到主机设置的机间间距与队形旋转方式
9.点击设置后从机遥控器上的飞机图标会变为蓝色将地图放大会看到灰色阴影的飞机图标,此图标为从机集结后要到达的目标位置,同时从机遥控器能看到主机设置的机间间距与队形旋转方式

注意事项:
- 建议配备基站或4G网络RTK机载模块,实现飞机的高精度定位。机间距离通常不小于15米(根据飞机本身尺寸而定);
- 飞行前需要将飞机按联吊队形进行摆放,飞机在地面摆放间距建议10米或以上
- 如有其其它疑问请关注微克智飞微信公众视频号或官网查询相关操作视频。