

39 измењених фајлова са 310 додато и 0 уклоњено
BIN
pics/任务作业.png
{kind=link}

BIN
pics/任务执行.png
{kind=link}
BIN
pics/任务规划.png
{kind=link}

BIN
pics/区域航线.png
{kind=link}
BIN
pics/单个编辑.png
{kind=link}

BIN
pics/参数设置.png
{kind=link}

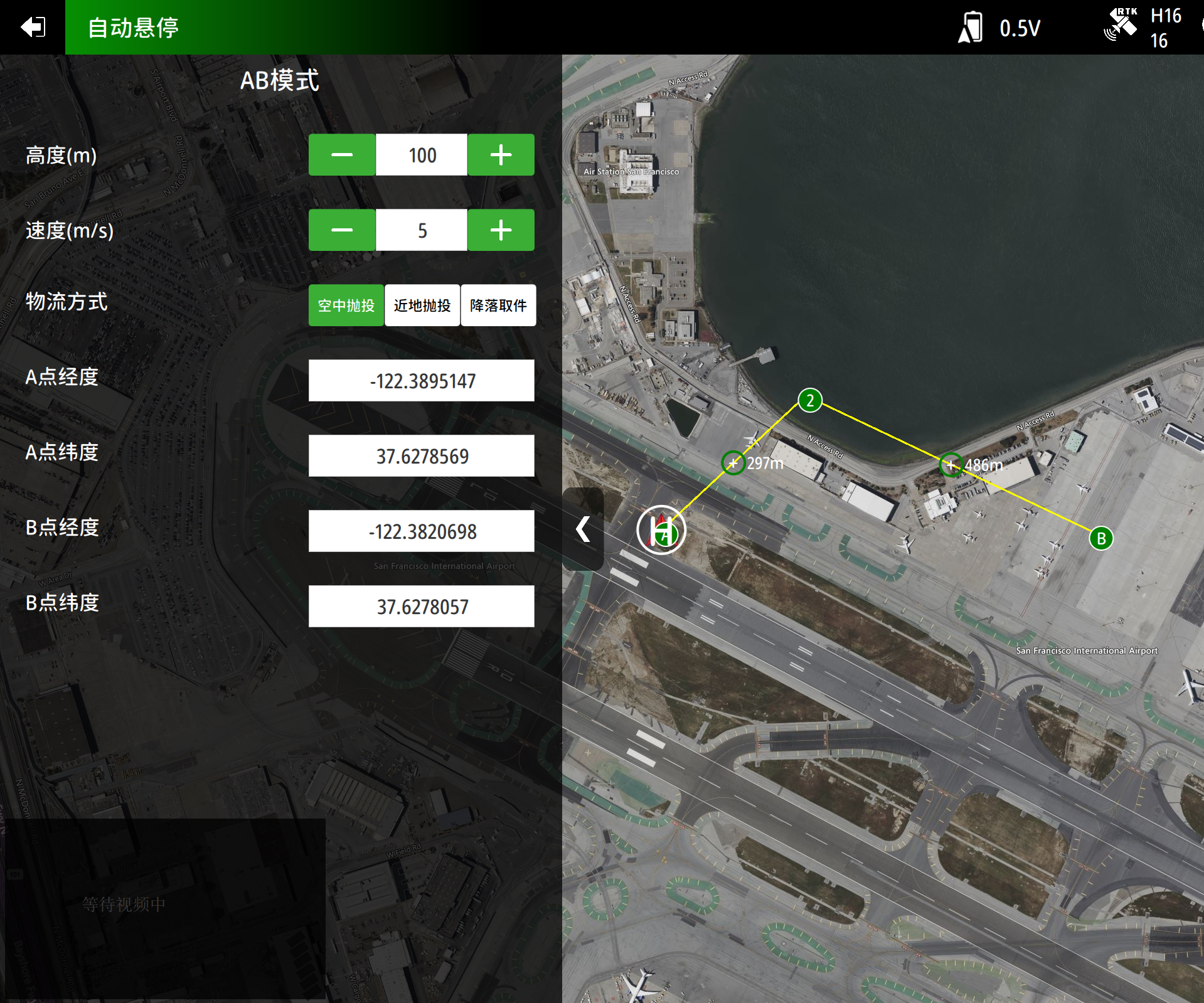
BIN
pics/多点物流.png
{kind=link}

BIN
pics/多点物流参数设置.png
{kind=link}
BIN
pics/安装设置.png
{kind=link}

BIN
pics/巡查模式.png
{kind=link}

BIN
pics/巡查模式选择.png
{kind=link}

BIN
pics/带状航线.png
{kind=link}
BIN
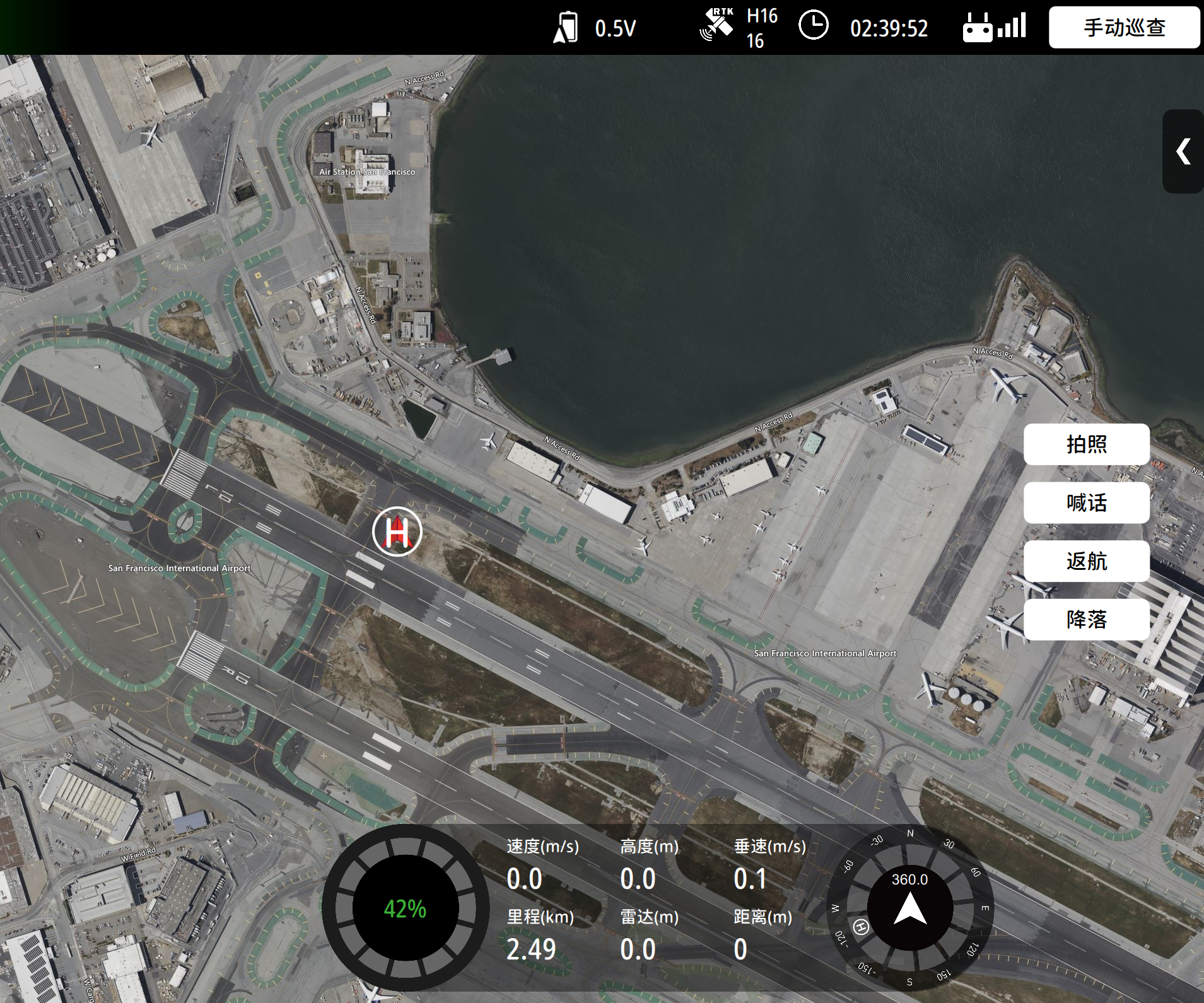
pics/手动巡查.png
{kind=link}
BIN
pics/手动物流.png
{kind=link}

BIN
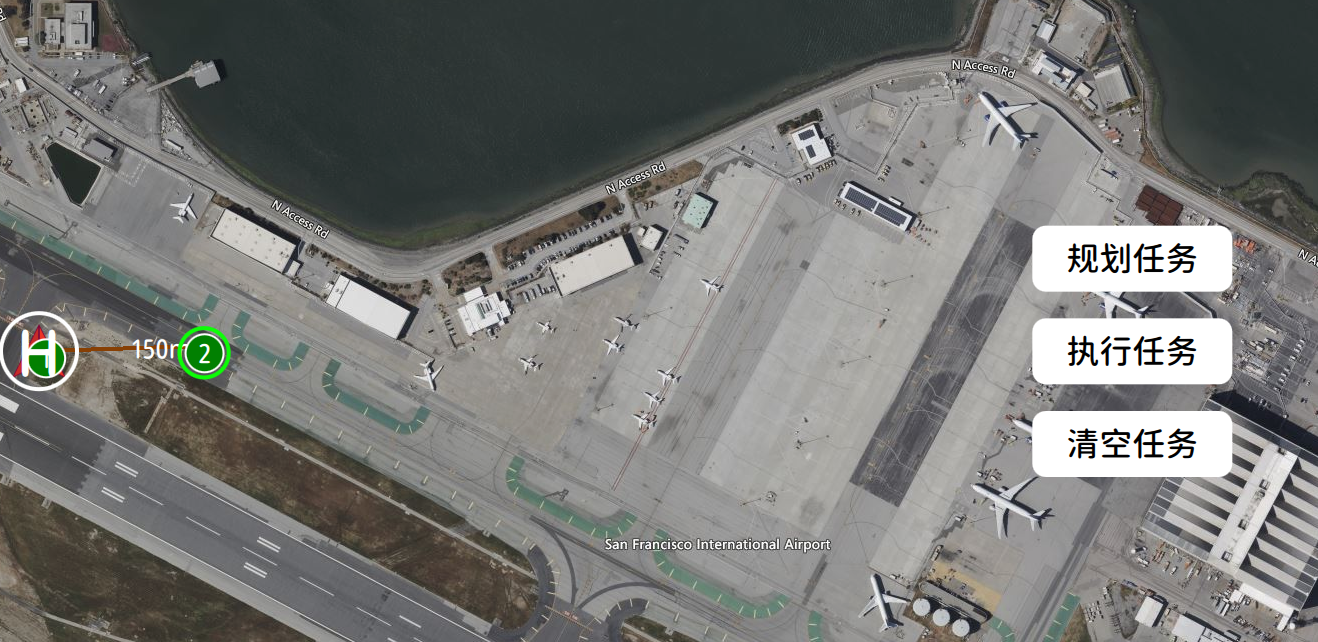
pics/执行任务.png
{kind=link}
BIN
pics/抛投通道.png
{kind=link}

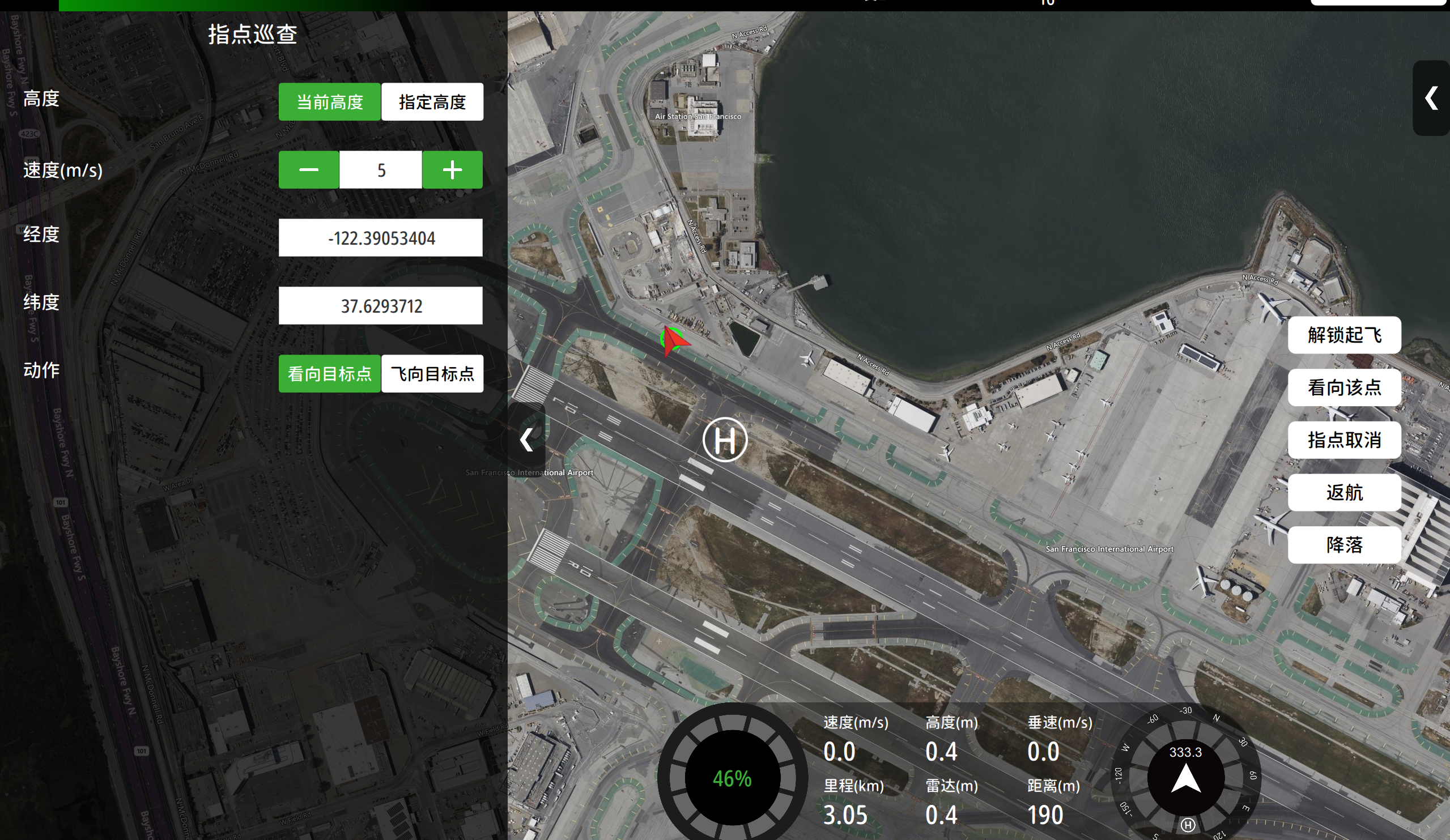
BIN
pics/指点巡查.png
{kind=link}

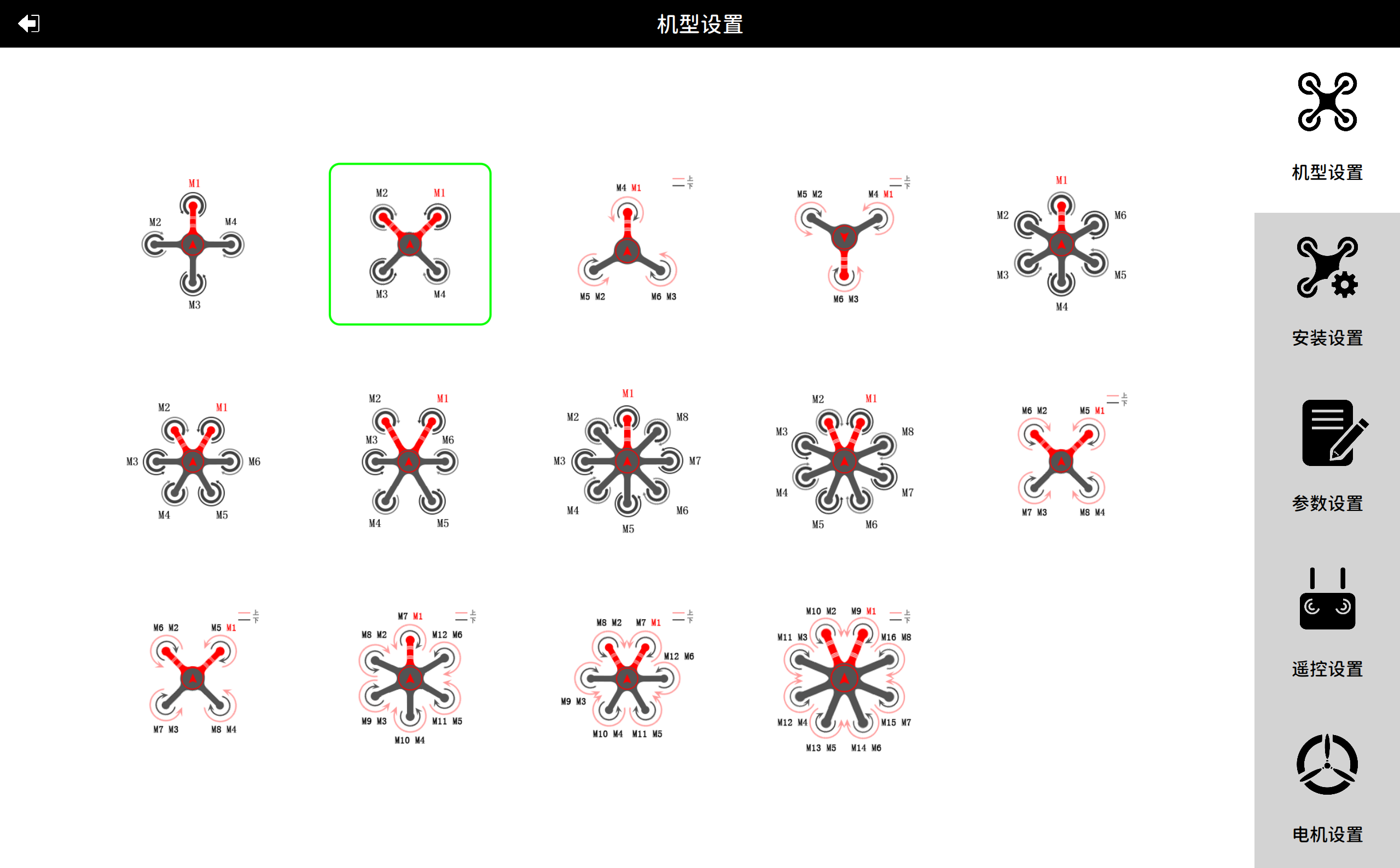
BIN
pics/机型设置.png
{kind=link}
BIN
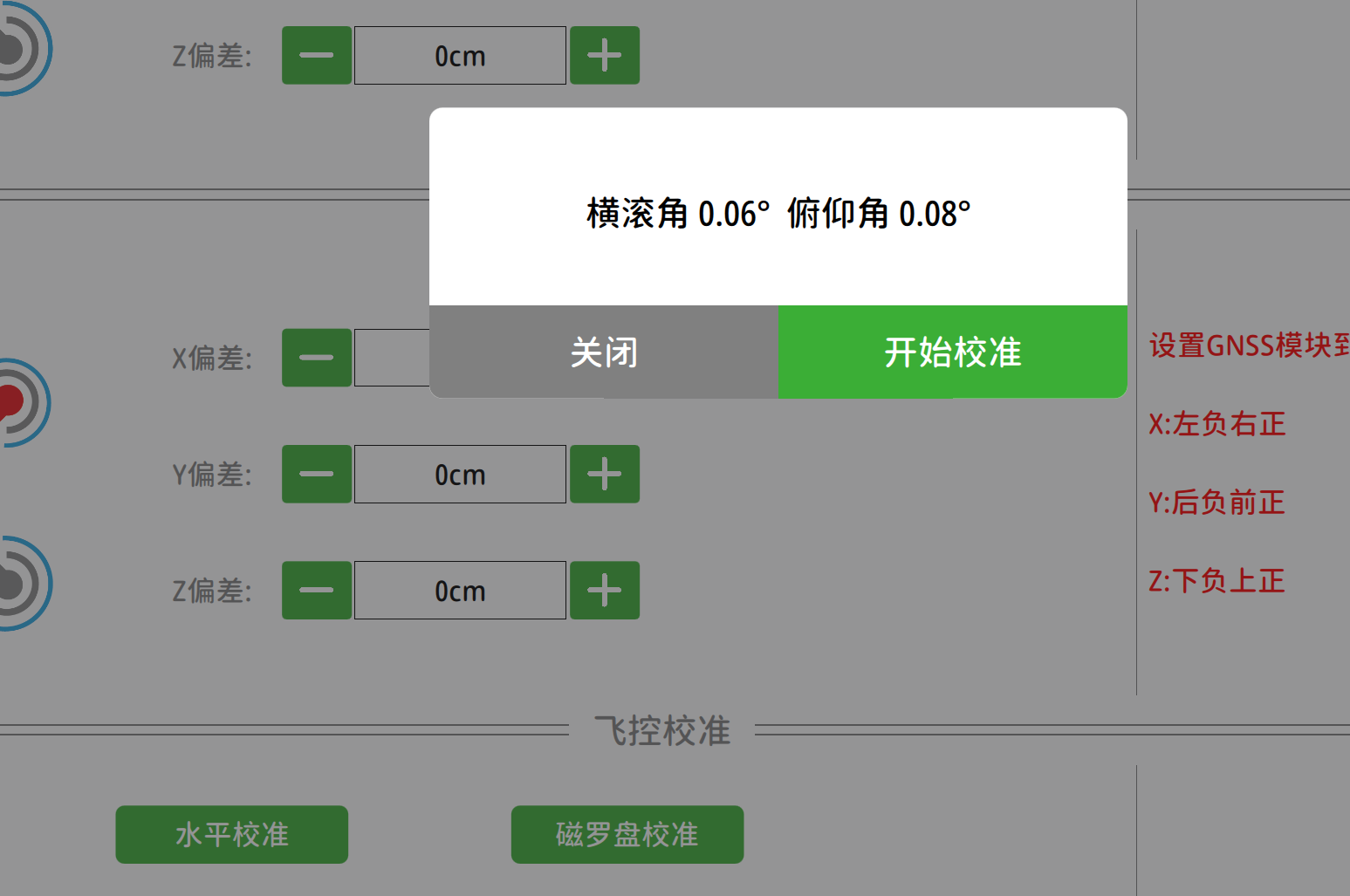
pics/水平较准.png
{kind=link}
BIN
pics/物流作业.png
{kind=link}

BIN
pics/电机设置.png
{kind=link}

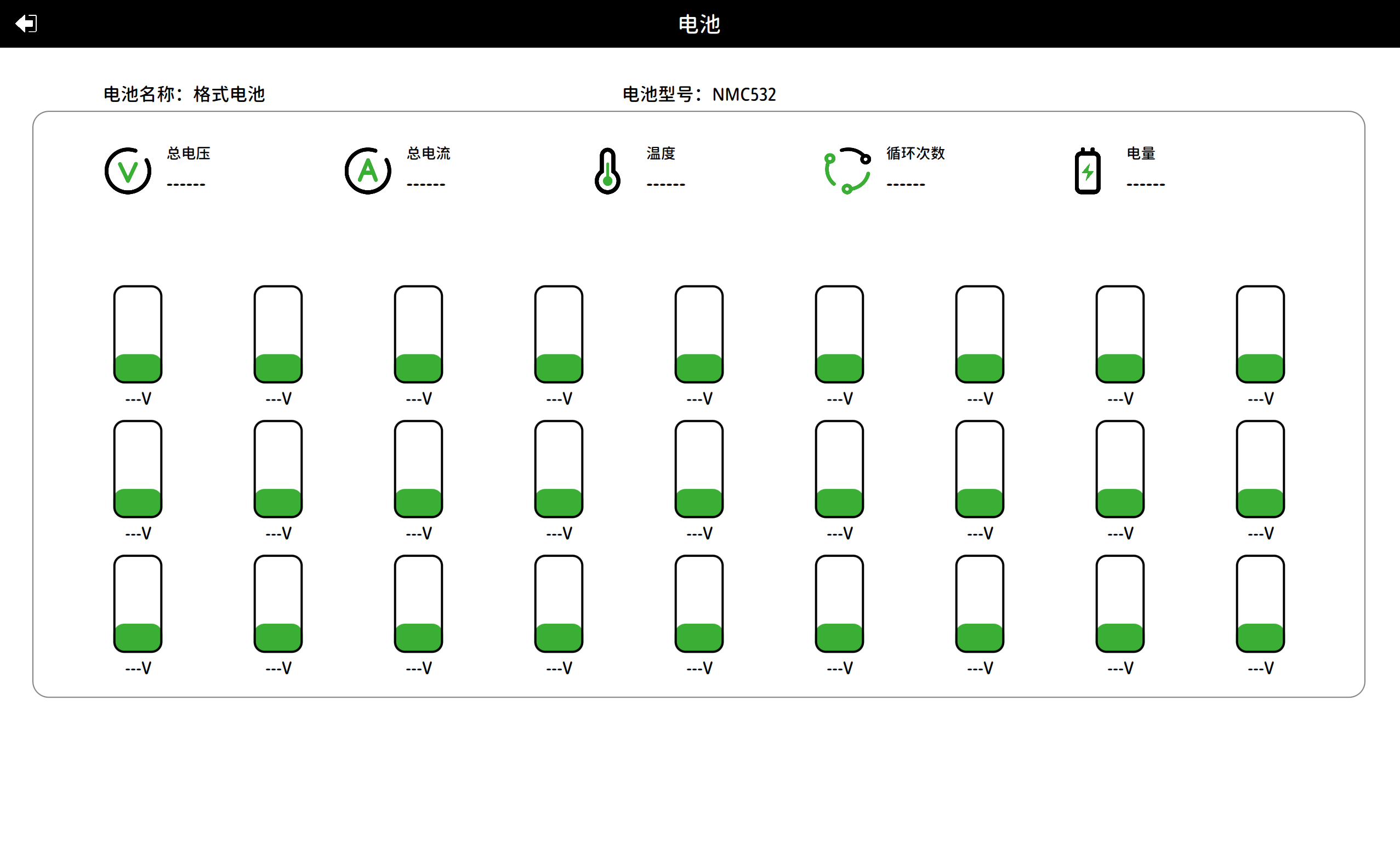
BIN
pics/电池.png
{kind=link}
BIN
pics/看向目标点.png
{kind=link}
BIN
pics/磁校准.png
{kind=link}

BIN
pics/继续任务.png
{kind=link}
BIN
pics/编辑面板.png
{kind=link}
BIN
pics/航线巡查任务规划.png
{kind=link}

BIN
pics/航线拍照.png
{kind=link}

BIN
pics/航线规划单挑航线.png
{kind=link}

BIN
pics/舵机状态.png
{kind=link}

BIN
pics/解锁起飞.png
{kind=link}

BIN
pics/载荷.png
{kind=link}

BIN
pics/近抛投高度.png
{kind=link}

BIN
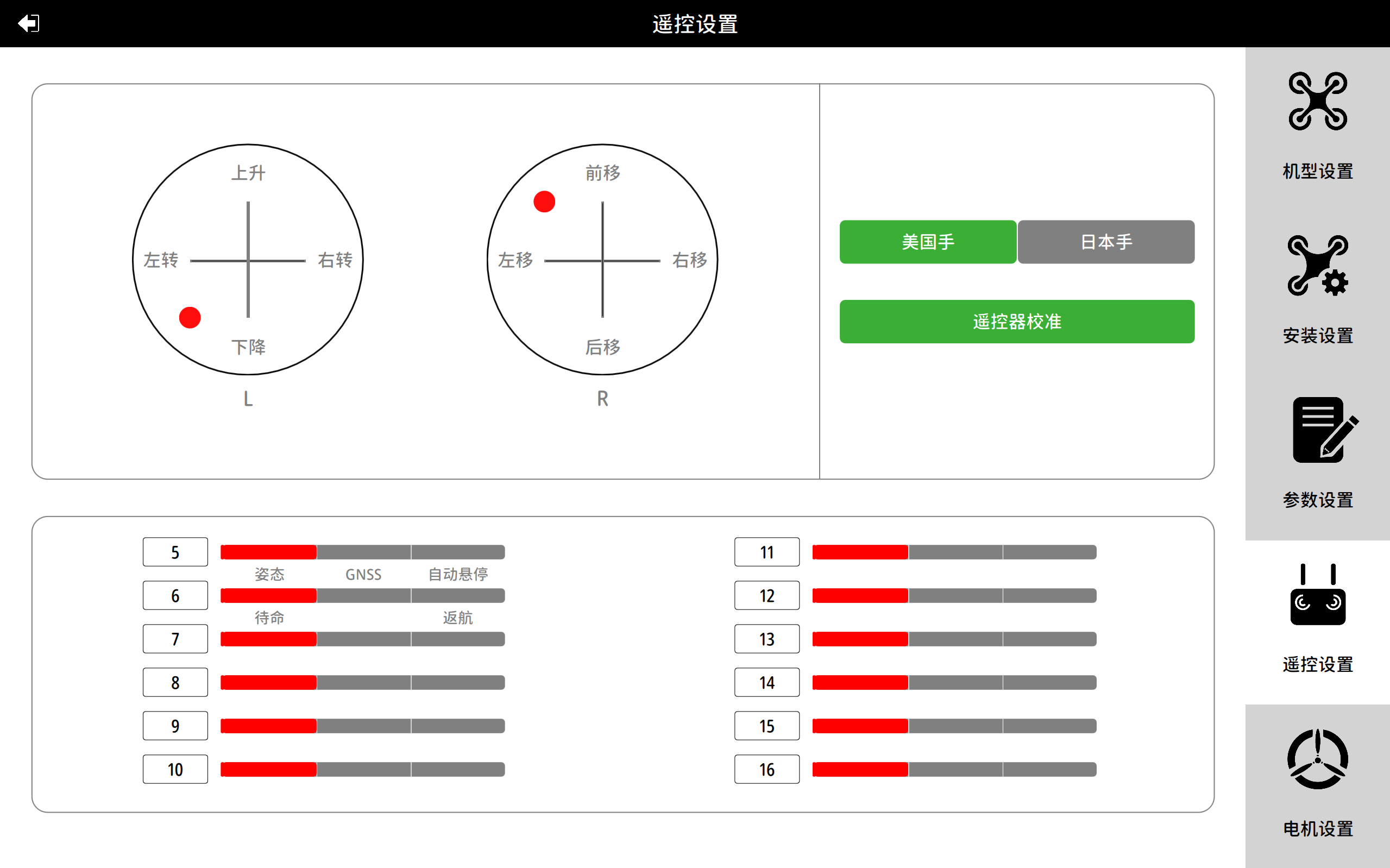
pics/遥控设置.png
{kind=link}
BIN
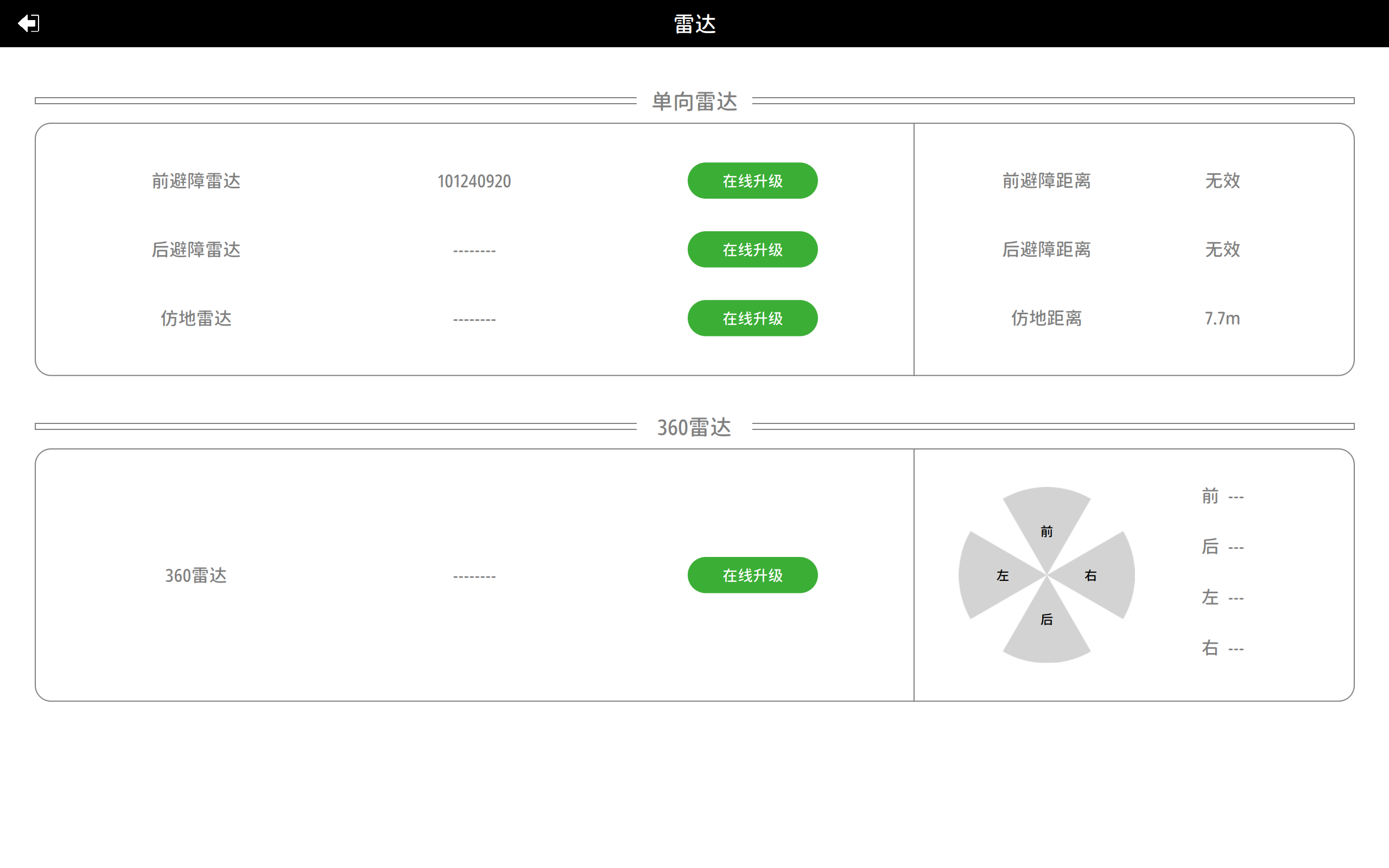
pics/雷达.png
{kind=link}
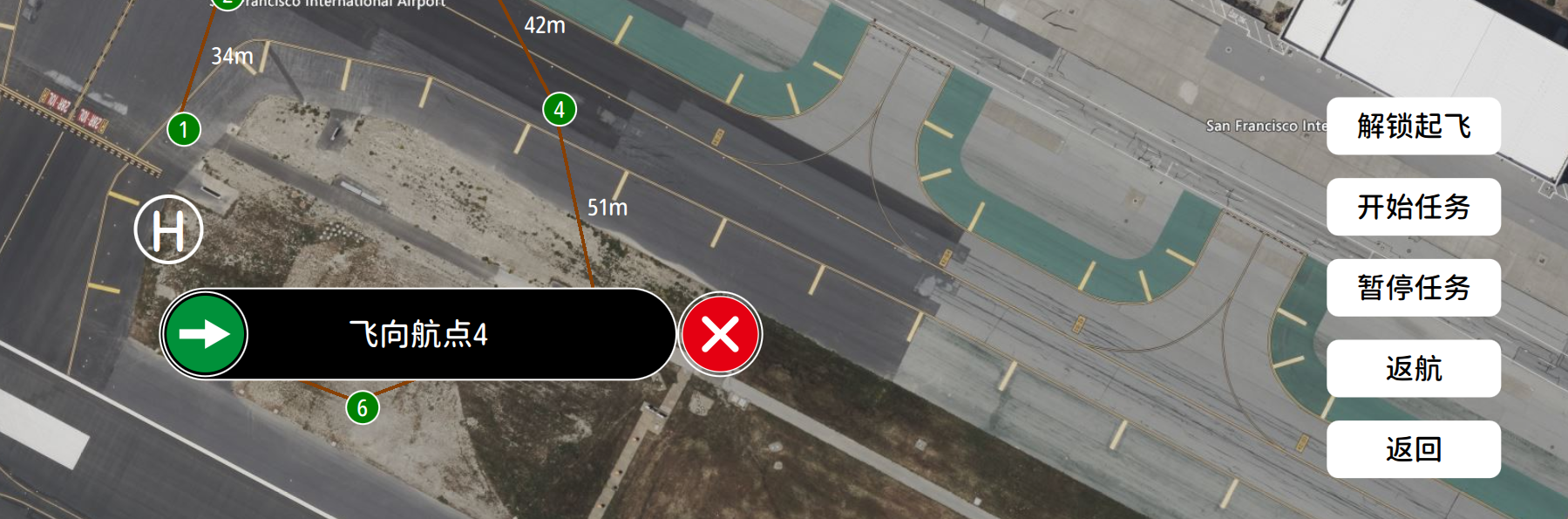
BIN
pics/飞向航点.png
{kind=link}

BIN
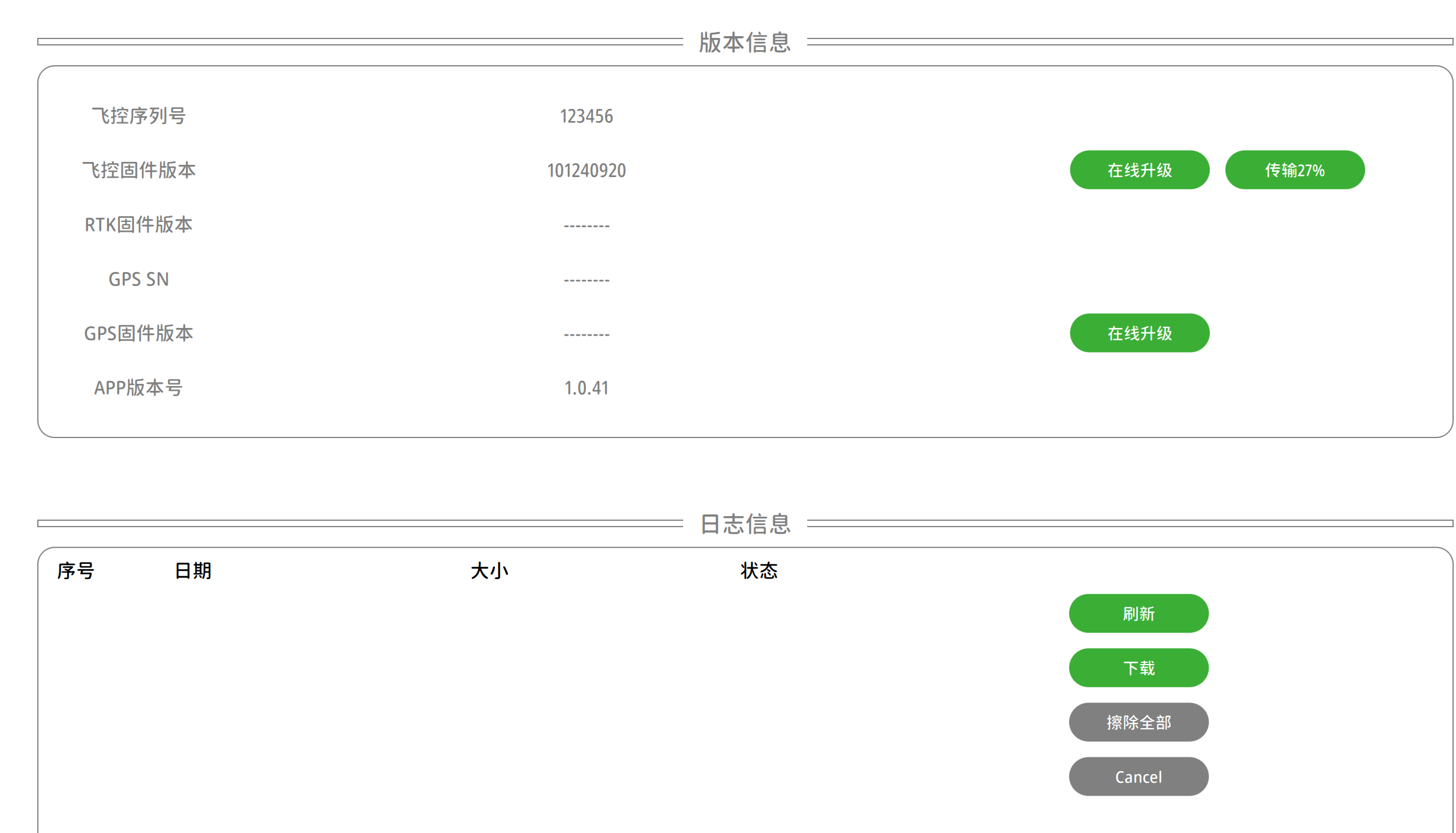
pics/飞控.png
{kind=link}
BIN
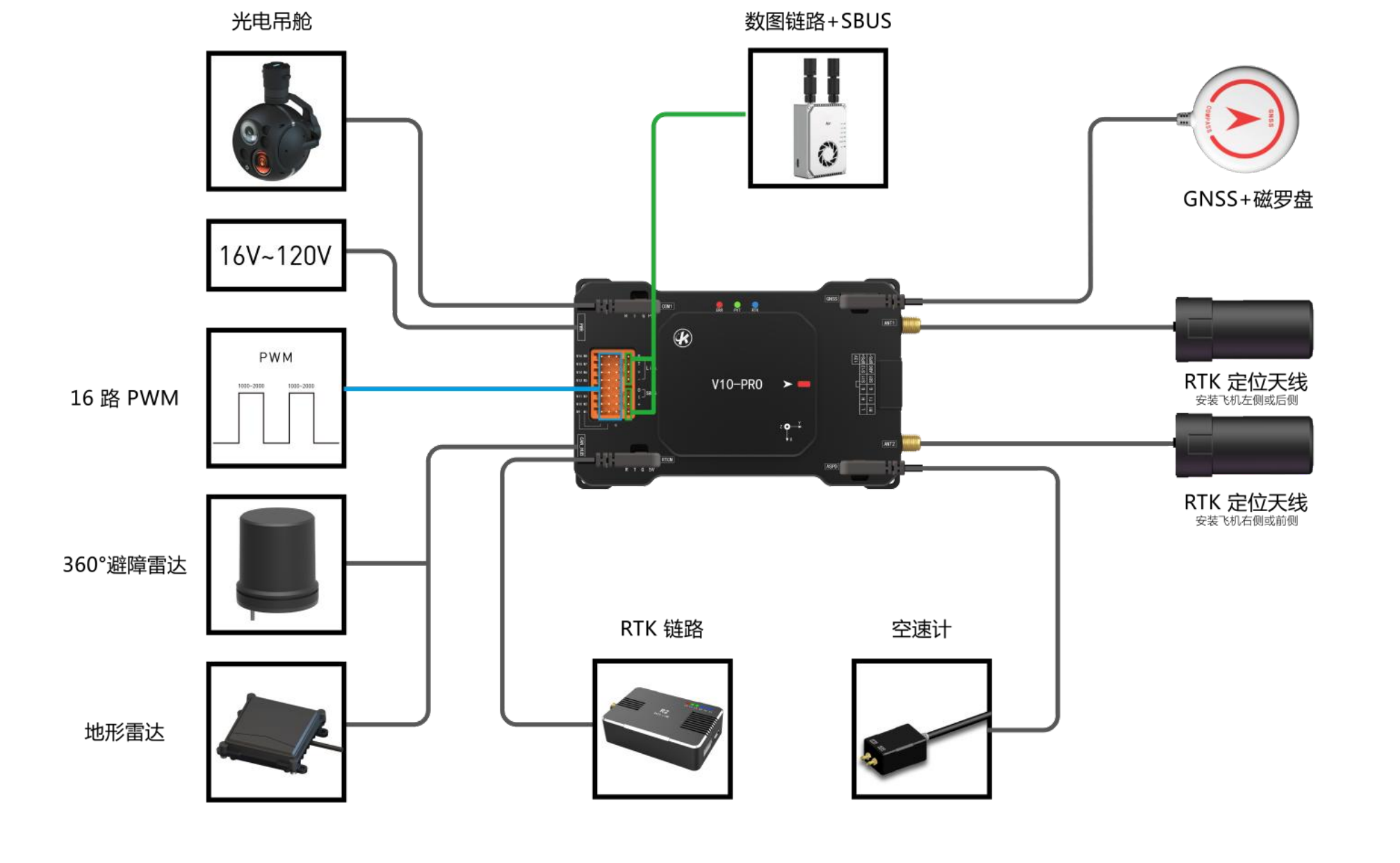
pics/飞控和各航电设备链接示意图.png
{kind=link}
+ 310
- 0
wordtomd.md
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||