|
|
@@ -1,7 +1,7 @@
|
|
|
-# V10新APP说明书
|
|
|
+# V10APP说明书
|
|
|
|
|
|
<!--toc:start-->
|
|
|
-- [V10新APP说明书](#v10新app说明书)
|
|
|
+- [V10APP说明书](#v10app说明书)
|
|
|
- [1 设备清单](#1-设备清单)
|
|
|
- [2 安装调试](#2-安装调试)
|
|
|
- [2.1 飞控和各航电设备链接示意图](#21-飞控和各航电设备链接示意图)
|
|
|
@@ -29,6 +29,10 @@
|
|
|
- [7.1 手动巡查](#71-手动巡查)
|
|
|
- [7.2 指点巡查](#72-指点巡查)
|
|
|
- [7.3 航线巡查](#73-航线巡查)
|
|
|
+ - [8 一站多机和编队飞行](#8-一站多机和编队飞行)
|
|
|
+ - [8.1 多机相关设置](#81-多机相关设置)
|
|
|
+ - [8.2 多机飞行操作](#82-多机飞行操作)
|
|
|
+ - [8.3 编队飞行操作](#83-编队飞行操作)
|
|
|
<!--toc:end-->
|
|
|
|
|
|
## 1 设备清单
|
|
|
@@ -398,3 +402,51 @@ AB物流的通常适用流程:
|
|
|
- 点击“返航”,飞机将返回起飞点;
|
|
|
- 在航点数字图标上点击,可弹窗执行飞往该点;
|
|
|
- 任务中若想重新规划和上传航线,可回到规划页面重新规划和上传。飞控将在执行完当前 目标航线后的下个航点,按新传输的航线飞行。若想立刻按新的航线执行,可直接点新的目标航点执行飞往该点。
|
|
|
+
|
|
|
+## 8 一站多机和编队飞行
|
|
|
+
|
|
|
+APP支持同时连接和操控多个无人机, 具有“一站多机”的能力。并且APP可以将1号无人机的状态数据转发同步给其它无人机,实现简单的无人机编队飞行。
|
|
|
+通常我们需要具备一对多的链路,或多个一对一的链路,在PC上进行多机相关的操作。常见的图数一体集成式遥控器如 MK32、MK15、H30、H20、H16等均只有一对一的遥控链路,无法实现一对多的操作。
|
|
|
+
|
|
|
+### 8.1 多机相关设置
|
|
|
+
|
|
|
+在“飞行页面”打开右边栏,选择“应用模式”为“集群”。
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+多机情景下,APP通过不同的飞机编号对无人机进行区分。因此首次使用前需要将各无人机进行不同的编号设置。无人机的编号可从 1到255。如果要进行编队飞行,1号ID无人机将作为队形主机,其它编号无人机做为队形从机。
|
|
|
+
|
|
|
+首次设置无人机编号的步骤:
|
|
|
+
|
|
|
+1. 将飞机单独上电并与APP连接;
|
|
|
+2. 在“飞行页面”右边栏,设置此无人机的“飞行器编号”;
|
|
|
+3. 将飞机下电
|
|
|
+对所有飞机按上述步骤分别设置不同的“飞行器编号”
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+### 8.2 多机飞行操作
|
|
|
+
|
|
|
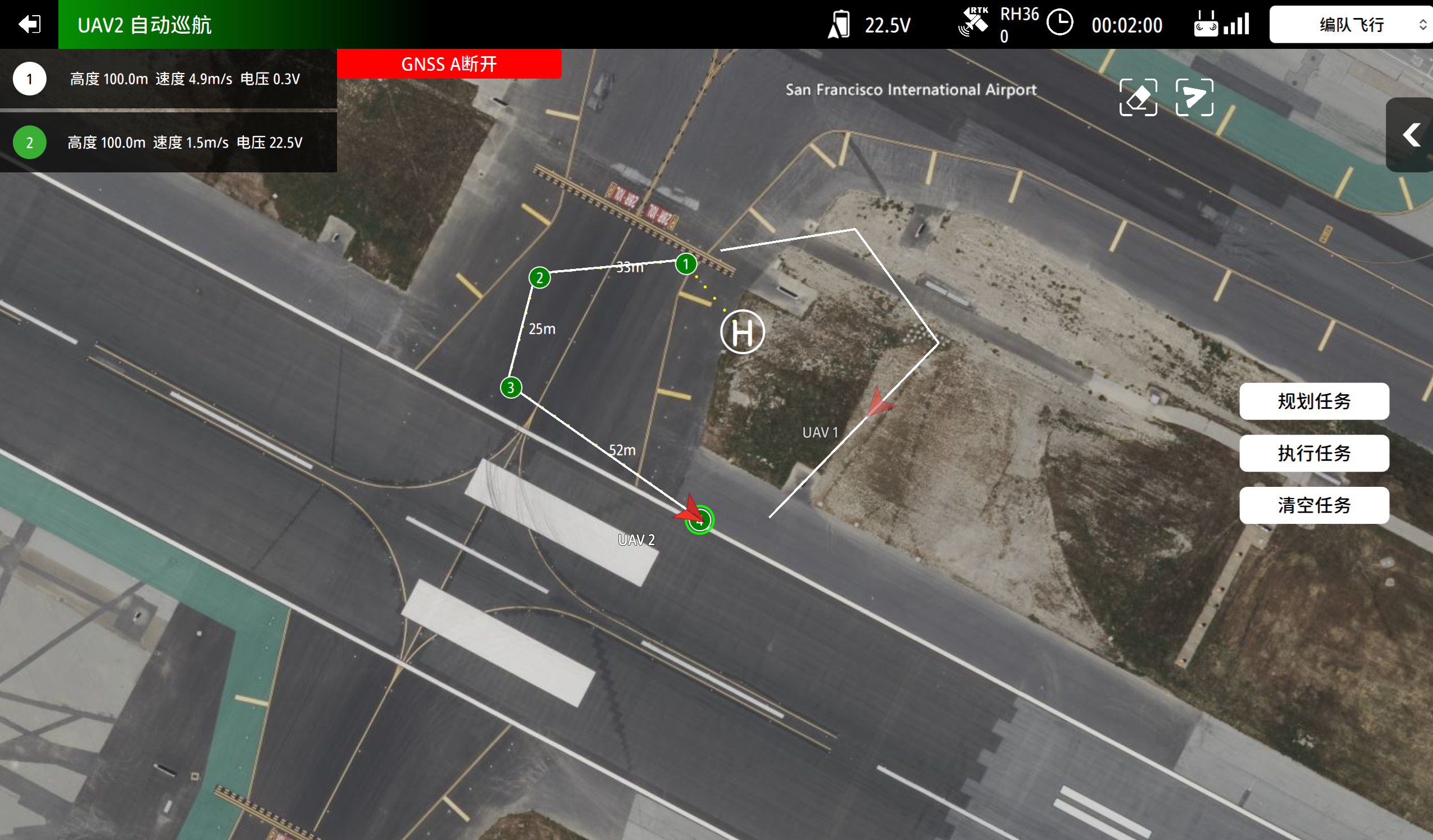
+多机时APP将同时显示多个飞机的图标和状态。可对单个选中的飞机进行指令操作,也可对全部飞机进行指令操作。可单独对每个飞机规划自己的航线。
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+左上角为飞机选择区,点选不同的飞机,然后可对其进行指令操作。
|
|
|
+
|
|
|
+
|
|
|
+### 8.3 编队飞行操作
|
|
|
+
|
|
|
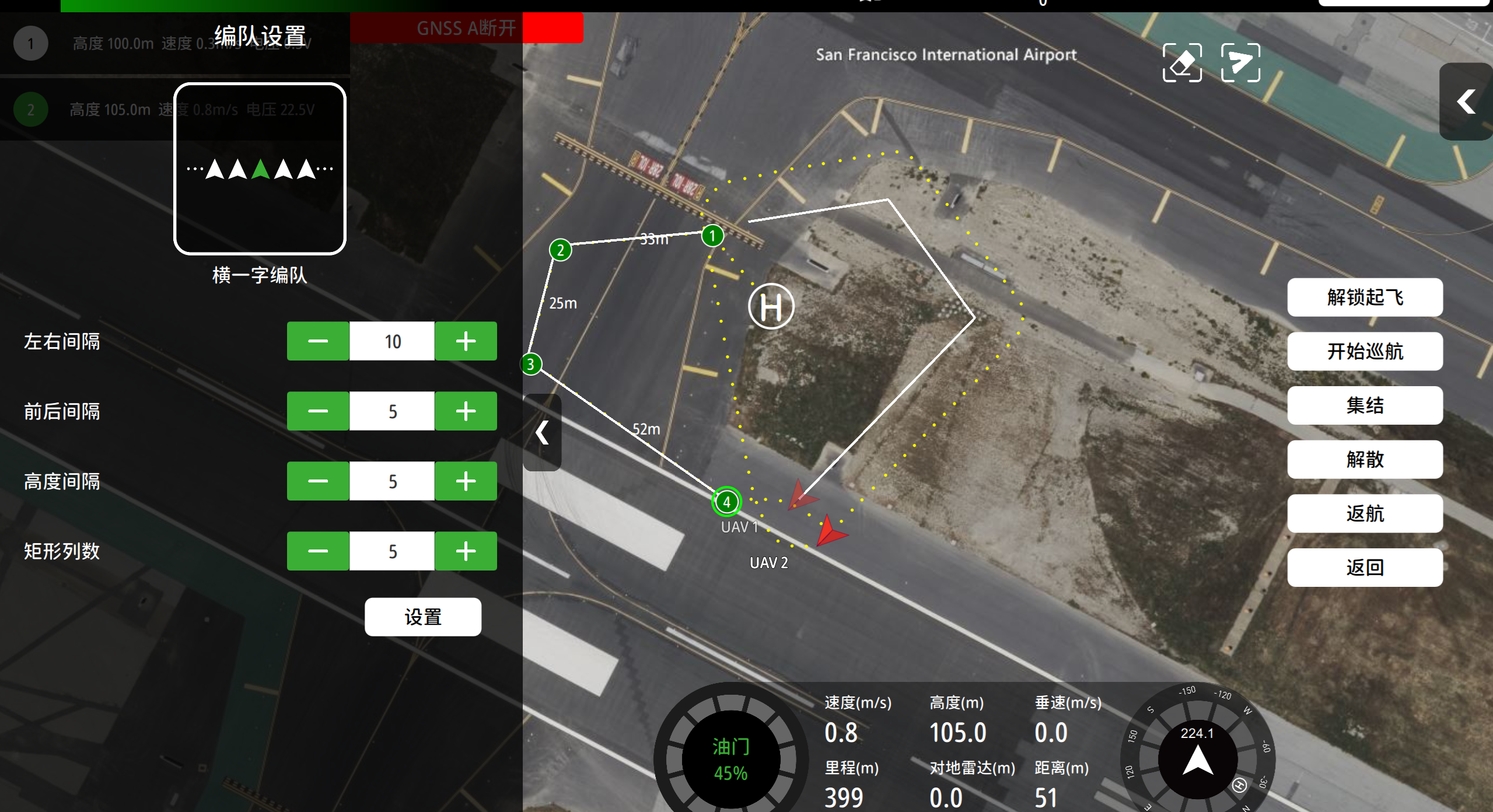
+编队飞行时,1号飞机作为队形主机,其它飞机根据自己的编号,计算并控制保持自己在设置的队形中对应位置,达到保持队形的效果。
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+编队飞行一般如下操作
|
|
|
+
|
|
|
+1. 打开“飞行页面”左边栏,选择需要的队形、间距等参数,点“设置”将信息发送给无人机;
|
|
|
+2. 将各飞机起飞后,左上角选择飞机,点击“集结”按钮,对应飞机将加入编队队形,飞向编号对应的位置;
|
|
|
+3. 左上角选择飞机,点击“解散”按钮,对应飞机将离开编队队形,进行悬停;
|
|
|
+4. 操作1号飞机进行航线或其它动作,所有在队飞机将与1号飞机保持队形随动。
|
|
|
+
|
|
|
+注意事项:
|
|
|
+1. 建议配备基站或4G网络RTK机载模块,实现飞机的高精度定位。机间距离通常不小于3米(根据飞机本身尺寸定);
|
|
|
+2. 飞机加入编队时注意飞机到达队形位置经过的直线路径,不要与其它飞机相撞。
|


{kind=link}

{kind=link}

{kind=link}
{kind=link}